主要内容
vrimport
将3D文件导入虚拟世界或节点
描述
[返回新节点的句柄和包含该节点的虚拟世界的句柄。节点,virtualWorld) = vrimport (___)
例子
导入STL文件到一个空的虚拟世界
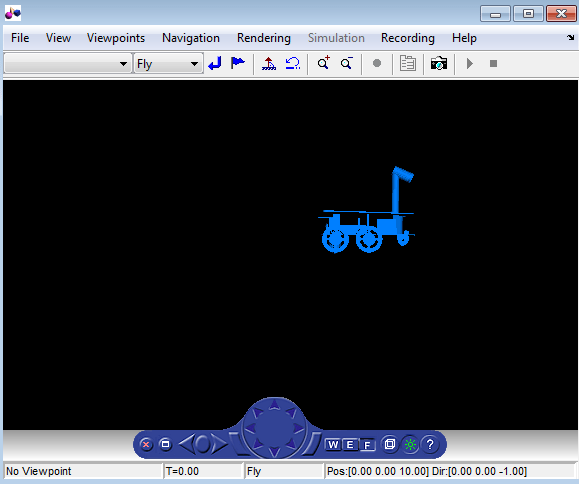
这个例子导入了一个STL文件rover_1.stl,一种简单的轮式机器人模型。该示例还展示了如何向虚拟世界中导入的模型添加视觉外观和材质节点。
用导入的模型创建一个虚拟世界。
[n, w] = vrimport ((“Rover_1.stl”));
使用导入的形状查看虚拟世界。
视图(w)
将导入的模型从mm缩放到dm,以在视图中看到它。
n.规模
绕x轴旋转探测车。
w.Rover_Transform。旋转= [1 0 0 -pi/2]
探索虚拟世界的结构。
get (w,“节点”)
STL导入的形状没有视觉属性。添加一个外观和一个材料节点到形状。的外观节点中创建的外观场的形状.的材料节点在材料场的外观节点。
应用= vrnode (w。Rover_Shape,“外观”,“Rover_App”,“外观”);垫= vrnode (w。Rover_App,“材料”,“Rover_Mat”,“材料”);
设置漫反射颜色为蓝色。
w.Rover_Mat。diffuseccolor = [0 0.5 1]
拯救虚拟世界。
保存(w,“Rover_1.wrl”)
导入DAE文件
这个示例导入一个.dae将文件格式化到虚拟世界中。
导入fox.dae文件到虚拟世界中的一个节点。
[n, w] = vrimport ((“fox.dae”))
n = vrnode对象:1-by-1 COLLADA_fox_Transform_0001 (Transform) [] w = vrworld对象:1-by-1(没有虚拟现实3D文件关联)
查看导入的可视化表示。
视图(w)

拯救虚拟世界。
保存(w,“fox.wrl”)
输入参数
输出参数
介绍了R2016b
你也可以从以下列表中选择一个网站: