主要内容
编码器
测量马达的旋转速度
- 库:
金宝appSimu金宝applink支持包Arduino硬件/ Arduino电机载体
描述
的编码器块从连接到MKR电机载体的编码器读取电机的位置和转速。位置以滴答声为单位,速度以每秒滴答声为单位。蜱虫计数的每一个增量表示顺时针旋转,而蜱虫计数的每一个减少表示逆时针旋转。
如果您模拟一个包含编码器块而不连接硬件,块输出为零。有关更多信息,请参见块在模拟中产生零或什么都不做.
港口
输出
参数
更多关于
计算电机的位置和转速
假设一个正交编码器连接到硬件。编码器有90个插槽。这意味着编码器的滴答数是每旋转4度一个。块样本时间为0.1秒,滴答计数在时间瞬间T= 0 = 0。在每个时间步骤中,块输出如下表所示的值。
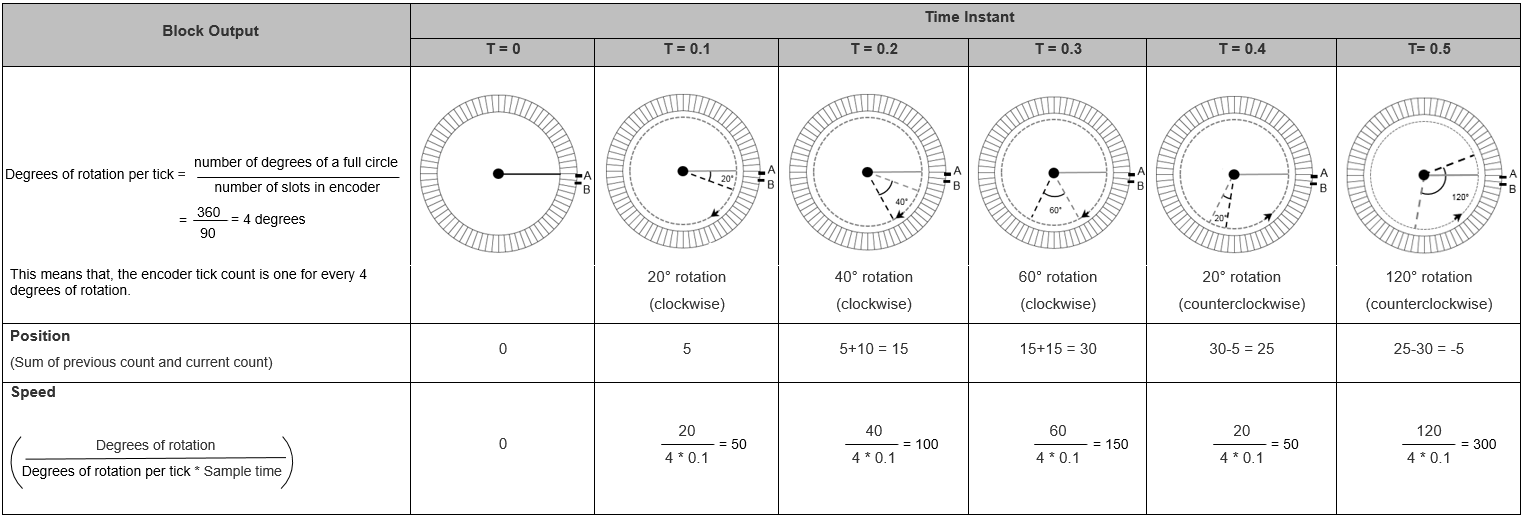
位置- - - - - -之间T= 0和T= 0.1时,编码器顺时针旋转20度。每一个刻度代表4度,所以位置输出为20 / 4 =
5.之间的T= 0.1,T= 0.2时,编码器顺时针旋转40度,因此位置输出是
15在T= 0.2 (5 fromT= 0.1 + 10 fromT= 0.2)。速度- - - - - -之间T= 0和T= 0.1时,编码器顺时针旋转20度。每一个刻度代表4度,所以速度输出为20 / (4 * 0.1)=
50.之间的T= 0.1,T= 0.2,编码器顺时针旋转40度。的速度输出是40 / (4 * 0.1)=
One hundred..
另请参阅
介绍了R2019a
你也可以从以下列表中选择一个网站:
