pcmapndt
基于正态分布变换的定位图
描述
的pcmapndt对象从预构建的环境点云图创建一个正态分布变换(NDT)图。NDT映射是一种压缩的、内存高效的表示,适合本地化。对象将点云图转换为一组体素(3-D盒),每个体素由3-D正态分布表示。使用selectSubmap对象函数从粗略的位置估计中选择映射中的子映射。使用findPose对象函数,用于基于组装的地图定位传感器的姿态。
创建
描述
ndtMap= pcmapndt (ptCloudMap,voxelSize)ptCloudMap.
属性
对象的功能
selectSubmap |
在map中选择子map |
isInsideSubmap |
检查查询位置是否在所选子映射内 |
findPose |
使用正态分布变换(NDT)算法在地图中定位点云 |
显示 |
可视化正态分布变换(NDT)图 |
例子
创建一个无损检测地图表示
加载一个点云视图集,该视图集保存于pcviewset对象。
数据=负载(“vSetPointClouds.mat”);vSet = data.vSet;
提取点云和绝对姿态来构建地图。
ptClouds = vSet.Views.PointCloud;vSet.Views.AbsolutePose;
通过使用绝对姿势对齐点云扫描来创建一个点云图。
ptCloudMap = pcalign(ptClouds,tforms);
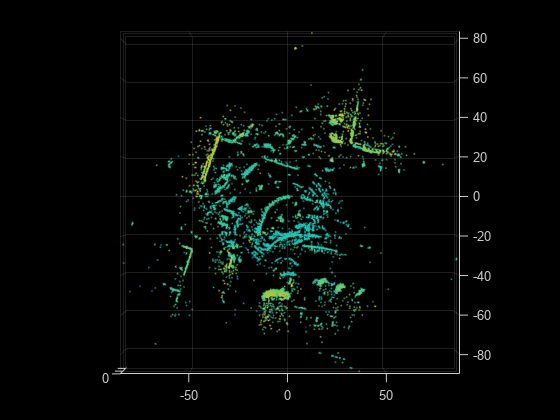
从点云图创建并可视化无损检测图。
voxelSize = 1;ndtMap = pcmapndt(ptCloudMap,voxelSize);图show(ndtMap)视图(2)%改变视角为俯视图
基于无损检测的激光雷达定位
从MAT文件加载正态分布变换(NDT)映射。
数据=负载(“ndtMapParkingLot.mat”);ndtMap = data.ndtMapParkingLot;
从第二个MAT文件加载点云扫描和姿态估计。
数据=负载(“parkingLotData.mat”);ptCloudScans = data.parkingLotData.ptCloudScans;initPoseEsts = data.parkingLotData.initPoseEsts;
显示无损检测图。
显示(ndtMap)
将视角更改为俯视图。
视图(2)
选择以第一个估计值为中心的子地图。
center = initPoseEsts(1).Translation;Sz = [70 50 20];ndtMap = selectSubmap(ndtMap,center,sz);
设置当前位置的可视化半径和更新子地图的距离阈值。
半径= 0.5;distThresh = 15;
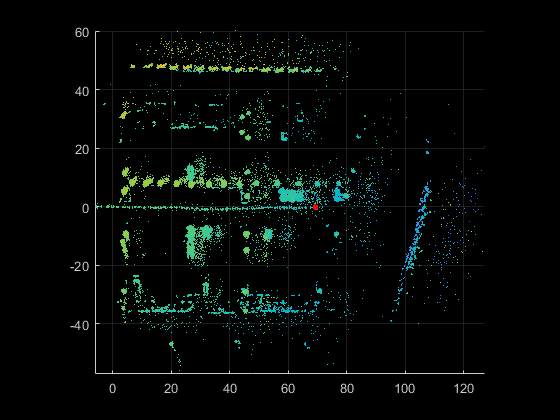
循环遍历点云,在地图中本地化它们,并根据需要更新所选的子地图。
numScans = nummel (ptCloudScans);为n = 1:numScans ptCloud = ptCloudScans(n);initPose = initPoseEsts(n);poseTranslation = initPose.Translation;[isInside,distToEdge] = isInsideSubmap(ndtMap,poseTranslation);submapNeedsUpdate = ~isInside...当前姿态在子映射之外|| any(distToEdge(1:2) < distThresh);当前位姿接近子地图边缘如果submapNeedsUpdate ndtMap = selectSubmap(ndtMap,poseTranslation,sz);结束在地图中定位点云扫描。currPose = findPose(ndtMap,ptCloud,initPose);将估算值的位置显示为圆形。pos = [currPose.Translation(1:2) radius];showShape (“圆”、pos、“颜色”,“r”);%暂停查看更改。暂停(0.05)结束
参考文献
比伯,P.和W.斯特拉瑟。正态分布变换:激光扫描匹配的一种新方法在2003年IEEE/RSJ智能机器人与系统国际会议论文集(IROS 2003) (Cat。No.03CH37453)卷3,2743-48。美国内华达州拉斯维加斯:IEEE, 2003。https://doi.org/10.1109/IROS.2003.1249285。
马格努松,马丁。三维正态分布变换:配准、表面分析和环路检测的有效表示博士论文,Örebro大学,2009。oru: http://urn.kb.se/resolve?urn=urn nbn公司禁止:se:女主角- 8458 urn: nbn公司禁止:se: oru:女主角- 8458。
扩展功能
版本历史
您也可以从以下列表中选择一个网站: