findPose
Localize a point cloud within a map using the normal distributions transform (NDT) algorithm
Description
铜rrPose= findPose(___,Name,Value)MaxIterations',30sets the maximum number of iterations before the function stops the NDT algorithm.
Examples
Lidar Localization Using NDT
Load a normal distributions transform (NDT) map from a MAT file.
data = load('ndtMapParkingLot.mat'); ndtMap = data.ndtMapParkingLot;
Load point cloud scans and pose estimates from a second MAT file.
data = load('parkingLotData.mat'); ptCloudScans = data.parkingLotData.ptCloudScans; initPoseEsts = data.parkingLotData.initPoseEsts;
Display the NDT map.
show(ndtMap)
Change the viewing angle to top-view.
view(2)
Select the submap centered around the first estimate.
center = initPoseEsts(1).Translation; sz = [70 50 20]; ndtMap = selectSubmap(ndtMap,center,sz);
Set the radius for visualization of the current location and the distance threshold to update the submap.
radius = 0.5; distThresh = 15;
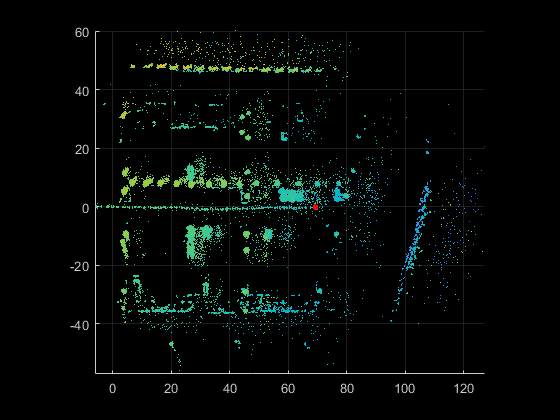
Loop over the point clouds, localize them in the map, and update the selected submap as needed.
numScans = numel(ptCloudScans);forn = 1:numScans ptCloud = ptCloudScans(n); initPose = initPoseEsts(n); poseTranslation = initPose.Translation; [isInside,distToEdge] = isInsideSubmap(ndtMap,poseTranslation); submapNeedsUpdate = ~isInside...% Current pose is outside submap|| any(distToEdge(1:2) < distThresh);% Current pose is close to submap edgeifsubmapNeedsUpdate ndtMap = selectSubmap(ndtMap,poseTranslation,sz);end% Localize the point cloud scan in the map.铜rrPose = findPose(ndtMap,ptCloud,initPose);% Display the position of the estimate as a circle.pos = [currPose.Translation(1:2) radius]; showShape('circle',pos,'Color','r');% Pause to view the change.pause(0.05)end
Input Arguments
Output Arguments
Tips
To improve the accuracy and efficiency of localization, consider downsampling the point cloud using
pcdownsamplebefore using this function.
References
Biber, P., and W. Strasser. “The Normal Distributions Transform: A New Approach to Laser Scan Matching.” InProceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453)Vol. 3, 2743–48. Las Vegas, Nevada, USA: IEEE, 2003. https://doi.org/10.1109/IROS.2003.1249285.
[1] Magnusson, Martin. "The Three-Dimensional Normal-Distributions Transform: An Efficient Representation forRegistration, Surface Analysis, and Loop Detection." PhD thesis, Örebro universitet, 2009. http://urn.kb.se/resolve?urn=urn:nbn:se:oru:diva-8458 urn:nbn:se:oru:diva-8458.
Extended Capabilities
Version History
See Also
Objects
Functions
哟u can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)