主要内容
pcdownsample
向下采样一个三维点云
语法
描述
ptCloudOut= pcdownsample (ptCloudIn,“随机”,百分比)百分比Input指定要返回到输出的输入部分。
ptCloudOut= pcdownsample (ptCloudIn,“gridAverage”,gridStep)gridStepinput指定3d盒子的大小。
ptCloudOut= pcdownsample (ptCloudIn,“nonuniformGridSample”,maxNumPoints)maxNumPoints,至少6.
例子
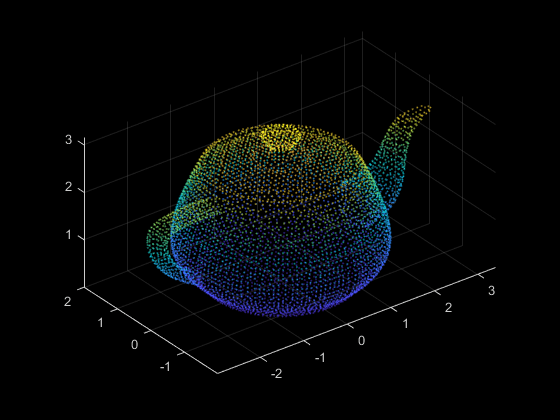
下采样点云使用框网格滤波器
读点云。
ptCloud = pcread (“teapot.ply”);
设置3-D分辨率为(0.1 x 0.1 x 0.1)。
gridStep = 0.1;ptCloudA = pcdownsample (ptCloud,“gridAverage”, gridStep);
可视化下采样的数据。
图;pcshow (ptCloudA);
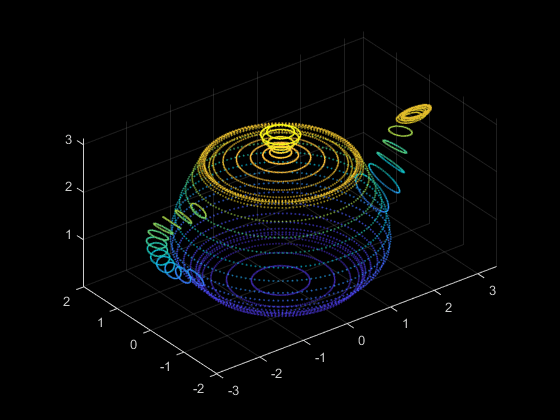
将点云与使用固定步长下采样的数据进行比较。
stepSize =地板(ptCloud.Count / ptCloudA.Count);指数= 1:stepSize: ptCloud.Count;ptCloudB = select(ptCloud, indices); / /索引图;pcshow (ptCloudB);
删除点云中的冗余点
创建一个点云,所有点共享相同的坐标。
ptCloud = pointCloud ((100 3));
将3-D分辨率设置为一个较小的值。
gridStep = 0.01;
现在输出只包含一个唯一的点。
ptCloudOut = pcdownsample (ptCloud,“gridAverage”gridStep)
ptCloudOut = pointCloud with properties: Location: [1 1 1] Count: 1 XLimits: [1 1] YLimits: [1 1] ZLimits: [1 1] Color: [0x3 uint8] Normal: [0x3 double] Intensity: [0x1 double]
输入参数
输出参数
参考文献
波默洛,F. Colas, R. Siegwart和S. Magnenat。“比较真实世界数据集上的ICP变体。”自主机器人.第34卷第3期,2013年4月,133-148页。
扩展功能
另请参阅
功能
对象
主题
介绍了R2015a
你也可以从以下列表中选择一个网站:
