ssdLayers
SSD多盒目标检测网络
描述
lgraph=ssdLayers(图像大小,numClasses,baseNetwork)baseNetwork,输入图像大小,以及网络应配置为分类的类别数。网络作为分层图(深度学习工具箱)对象。
SSD是一个基于卷积神经网络的对象检测器,可以预测边界框坐标、分类分数和相应的类标签。
lgraph=ssdLayers(___,锚箱,predictorLayerNames)锚箱在指定的位置连接到网络层的predictorLayerNames.除了前面语法中的输入参数外,还要指定这些参数。
例子
使用VGG-16网络创建SSD网络
指定基本网络。
基本网络=“vgg16”;
指定图像大小。
imageSize = [300 300 3];
指定要检测的类。
numClasses = 2;
创建SSD对象检测网络
lgraph=ssdLayers(图像大小、numclass、基本网络);
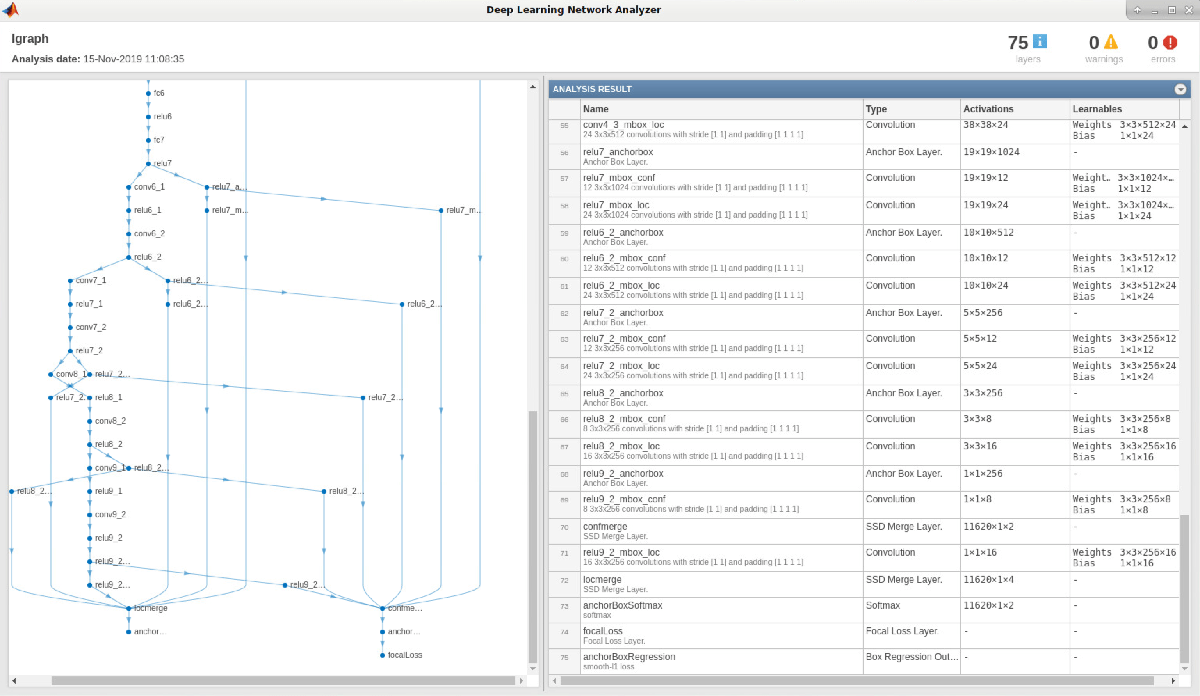
使用网络分析器可视化网络。
分析网络(lgraph)
输入参数
输出参数
算法
这个ssdLayers函数创建SSD网络并返回lgraph,表示SSD对象检测器的网络体系结构的对象。
这个trainSSDObjectDetector函数训练并返回SSD对象检测器,SSD探测器.使用发现目标函数SSD探测器对象使用经过SSD网络体系结构培训的探测器检测对象。
bbox=检测(检测器,I)
这个ssdLayers函数使用预训练的神经网络作为基础网络,向其添加创建SSD对象检测网络所需的检测子网络。给定基础网络,ssdLayers删除基本网络中要素层之后的所有层,并添加检测子网络。检测子网络由一组串联卷积、校正线性单元(ReLU)和批量归一化层组成。检测子网中增加了SSD合并层、盒回归层和焦损分类层。
参考文献
[1] 刘伟、德拉戈米尔·安格洛夫、杜米特鲁·二汉、克里斯蒂安·塞格迪、斯科特·里德、程扬福和亚历山大·贝格,《SSD:单激发多盒探测器》,载于计算机视觉-ECCV 2016,由Bastian Leibe、Jiri Matas、Nicu Sebe和Max Welling编辑,9905:21-37。Cham:Springer国际出版社,2016年。https://doi.org/10.1007/978-3-319-46448-0_2.
[2] Huang, Jonathan, Vivek Rathod, Chen Sun, Menglong Zhu, Anoop Korattikara, Alireza Fathi, Ian Fischer, et al.现代卷积目标探测器的速度/精度权衡在2017 IEEE计算机视觉与模式识别大会(CVPR),3296-97。檀香山,HI:IEEE,2017。https//doi.org/10.1109/CVPR.2017.351。
另见
物体
功能
trainSSDObjectDetector|analyzeNetwork(深度学习工具箱)|resnet50(深度学习工具箱)|vgg16(深度学习工具箱)|resnet101(深度学习工具箱)
你也可以从以下列表中选择一个网站:
