使用深度学习开始点云开始
深度学习可以自动处理点云,用于广泛的3-D成像应用。点云通常来自3-D扫描仪,例如LIDAR或Kinect®设备。它们具有机器人导航和感知,深度估计,立体声视觉,监控,场景分类以及高级驾驶员辅助系统(ADA)中的应用。
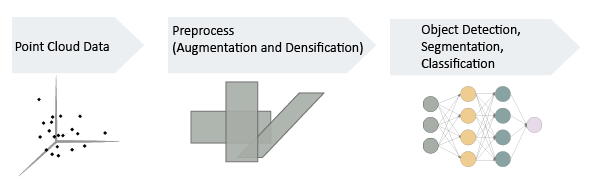
通常,在深入学习工作流中使用点云数据的第一步是:
导入点云数据。使用数据存储来保存大量数据。
(可选)增加数据。
将点云编码为与MATLAB一致的图像状格式®基于深入学习工作流程。
您可以使用Point Cloud Data将相同的深度学习方法应用于分类,对象检测和语义分段任务,因为您将使用常规网格图像数据。但是,您必须首先将无序,不规则地将点云和LIDAR数据的结构编码为常规网格形式。对于某些任务(例如语义分割),需要在基于图像的网络输出的一些后处理,以便恢复点云结构。
导入点云数据
为了在深度学习工作流中使用点云数据,首先,阅读原始数据。考虑使用数据存储来使用并表示过大以一次适合内存的数据集合。由于深度学习往往需要大量数据,因此数据存储是Matlab中深入学习工作流程的重要组成部分。有关数据存储的更多详细信息,请参阅深入学习的数据购物(深度学习工具箱)。
这进口点云数据进行深度学习示例导入大点云数据集,然后配置并加载数据存储。
增强数据
深度学习模型的准确性和成功取决于大的注释数据集。使用增强以产生较大的数据集有助于减少过度装备。当分类系统错误为信号中的数据中的噪声错误时,会发生过度装箱。通过添加额外的噪声,增强有助于模型平衡数据点并最小化错误。增强还可以增加对原始训练数据中可能不得很好的数据变换的鲁棒性,(例如旋转,反射,翻译)。通过减少过度装箱,增强通常可以导致推理阶段的结果更好,这使得基于深度学习神经网络已经训练以检测到的预测。
这增强点云数据进行深度学习示例设置具有点云数据的基本随机数据增强管道。
将点云数据编码为类似图像格式
要使用基于Matlab的深度学习工作流程的点云,必须将数据编码为密集的图像状格式。致密化或者体素化是将不规则,未完成的点云数据转换为密集图像形式的过程。
这编码点云数据进行深度学习示例将点云数据转换为密集的网格结构。
使用编码点云数据列车深度学习分类网络
将编码点云数据分为密集形式后,您可以使用标准深度学习方法使用基于图像的分类,对象检测或语义分段任务的数据。
这列车分类网络以在3-D点云中对象进行分类示例预处理点云数据进入体文化编码,然后使用简单的3-D卷积神经网络与图像类似的数据到PEForm对象分类。
也可以看看
Bboxcrop.|bboxresize.|Bboxwarp.|PCBIN.|p
相关例子
- LIDAR 3-D对象检测使用PINEPILLARS深度学习(LIDAR工具箱)
- 点云分类使用点深深学习(深度学习工具箱)
- 使用POINSEG深度学习网络的LIDAR点云语义分割(深度学习工具箱)
更多关于
- 分割,检测和标记(LIDAR工具箱)
您还可以从以下列表中选择一个网站:
