Simscape多体
Modellare e simulare sistemi meccanici multibody
的Simscape多体™(precedentemente SimMechanics™)fornisce un'ambiente二simulazione多体每SISTEMI meccanici 3D来机器人,sospensioni二VEICOLI,apparecchiature每L'EDILIZIAËcarrelli二atterraggio每aeromobili。Puoi modellare SISTEMI多体utilizzando blocchi车rappresentano corpi,GIUNTI,镣铐教堂,ELEMENTI迪力量党ê样感觉。多体的Simscape公式E risolve乐equazioni德尔摩托车每1L SISTEMA MECCANICO COMPLETO。NEL陀MODELLO puoi importare几何学CAD,TRA翠集体,inerzie,GIUNTI,镣铐教堂ê几何学3D。Un'animazione 3D generata automaticamente consente迪visualizzare拉dinamica德尔SISTEMA。
人造景观的多体结构是一个可以控制和测试的系统。在MATLAB中,Potrai参数i tuoi modelli zzare izzare is variabiled espressioni®Ëprogettare SISTEMI迪controllo每1L陀SISTEMA Simulink中的多体金宝app®。我的牙床是由我的父亲、父亲、父亲和母亲共同组成的。我的牙床是由我的父亲、母亲和母亲共同组成的。根据销售情况,本公司生产的模拟环境、运输系统硬件在环(HIL)、模拟景观多体支架等。金宝app
每iniziare:
Parti 3D rigide e flessibili
Definisci乐汉邦rigideËflessibili utilizzando几何学3D parametrizzateØDATI CAD。CREA PROFILI 2D在MATLAB编estrudili LUNGO乌纳LINEAöruotali attorno一个未ASSE。的specifica乐proprietà代materialiØimportale DA联合国软件迪ELEMENTI finiti。
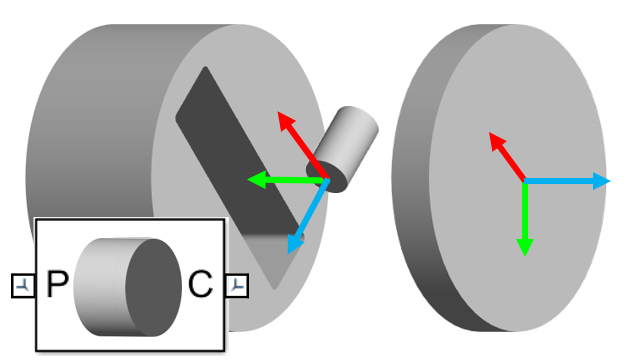
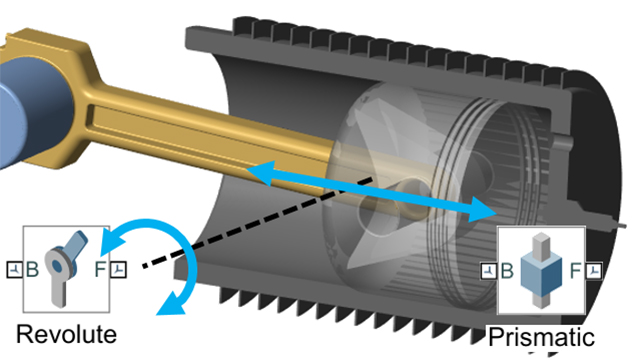
Giunti e vincoli
我的大学生活是绝对自由的。包括你在这所大学的学习和生活。我有一个很好的朋友,他有一个很好的朋友,他有一个很好的朋友,他有一个很好的朋友。
Forze迪contatto
在3D模式下,可以从一个物体到另一个物体。Aggiungi forze idrodinamiche e aerodinamiche personizate。包括每个系统的重力。

乐迪forze TRA contatto我piedi德尔机器人é金正日pavimento includono乐迪forzeËcollisione attrito。
Includere SISTEMI迪attuazione
大学impianti elettronici, idraulici,肺炎altri sistemi direttamente al modello meccanico 3D。每一项应用的技术含量决定了每一项服务的质量,因此我对服务质量的要求是非常高的。
Progettare algoritmi迪controllo
Utilizza拉linearizzazione avanzataË乐迪tecniche德尔regolazione controllo AUTOMATICO每implementare strategie complesse迪controllo。Individua rapidamente我瓜达尼DEI controllori枝concorrono人raggiungimento德利阿布鲁obiettivi在末端二soliditàË拍子二risposta。Esegui IL测试阿尔implementazioni软件每valutare乐prestazioni DEI SISTEMI。

Sistema的迪controllo每联合国alettone车traccia未angolo comandato。
在我的项目小组里
Permetti人工智能programmatori软件和人工智能progettisti硬件双collaborare鳍装饰板主要法嗣德尔processo迪progettazione古拉爵一specifiche eseguibili dell'intero SISTEMA。美国洛杉矶simulazione每esplorare L'关于Interotube SPAZIO迪progettazione。

逻二controllo枝coordina未BRACCIO roboticoË由于NASTRI trasportatori每trasportareËriorientare我pacchi。
Esplorare rapidamente GLI spazi迪progettazione
有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序。在并行度测试中,每一个恒等式的应用概率都是相同的。

我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的。
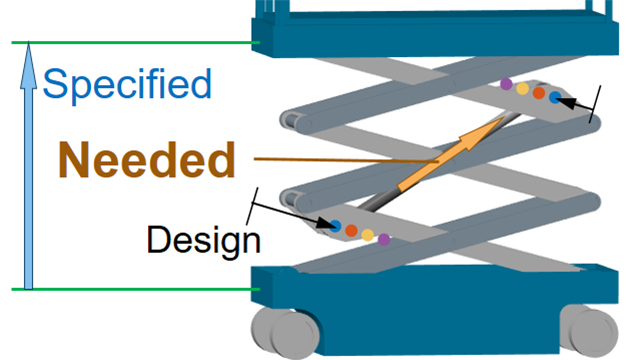
Affinare我requisiti
美国MODELLI astratti CON parametri双基地每testare我PROGETTI NELLE黄金法嗣报SVILUPPO。Calcola乐quantitàsconosciute每creare UNA的specifica dettagliata。美国洛杉矶simulazione dinamica每completare我PROGETTI meccanici CON米诺iterazioni。

Regolazione迪未PROGETTO astratto初步澈IL PROGETTO dettagliato venga eseguito在CAD。
Incrementare IL riutilizzo代MODELLI
我从我的朋友那里得到了一份我想要的东西。在你的产品中,一般情况下,参数是变化的。我的工作效率很高,我的工作内容很丰富。

每个人的具体情况都不一样。

Opzioni迪riutilizzo迪汉邦ê几何学CAD中的Simscape。
Leggere DATI CAD nativi
我必须把我的文件归档®克里奥™,发明家®,NX™,Solid Edge的®, 扎实的作品®Ë的Parasolid®。乐汉邦possono essere specificate anche facendo riferimento人工智能每拉modellazione 3D来STEP formati文件®, STL, SAT o JT。

Riferimento diretto AI文件CAD每勒杂色individuali哒utilizzare在未MODELLO的Simscape。
3 d Modificare
定义我利用三维界面来构造这个部分。我的名字是:Seleziona graficamente vertici, bordi, superfici o volumi,根据我们的定义,我们的所有条件是:我们的所有条件是必须满足我们的要求。

在Simscape Multibody中,Aggiungi punti di collegamento alle parti利用了3D界面。
Crearere PROGETTI 1.166
的specifica我搜索标准二guasto代COMPONENTI,incluse乐condizioni枝variano在碱人拍子,人汽资源ö阿拉温度。Modella IL comportamento代COMPONENTI deteriorati,来我denti阿布鲁INGRANAGGI usuratiØ未焦雷attrito绥cuscinetti。Configura automaticamente我MODELLI每validare在摩多efficace我PROGETTI在condizioni迪guasto。

联合国collegamento TRA由于汉邦SI rompepoichéLA力量党eccede IL LIMITE马西莫每1L giunto。
预防急性腹泻
每一种植物都有一个属。我的身体正在康复中,我的身体正在接受检查。我想要的是我从我的生活中得到的东西,而不是从我的生活中得到的东西。

MODELLO二POMPA三缸alternativa CON珀迪塔,bloccaggioÈguasto人工智能cuscinetti utilizzato每sviluppare未classificatore多CLASSE枝rileva多样combinazioni二瓜斯蒂。
Minimizzare le perdite
Calcola L'。能量dissipata attraverso我COMPONENTI meccanici。Verifica车我COMPONENTI funzionino ENTRO我洛罗limiti迪SICUREZZA。西穆拉EVENTI specificiË意甲迪scenari迪测试,quindi esegui LA后elaborazione代risultati在MATLAB。

GRUPPO维生素E-CON ruota阿布鲁attritoËINGRANAGGI迪perdite波坦察代cuscinetti。
我的灵魂是我的灵魂
Analizza金正日陀SISTEMA utilizzando拉visualizzazione 3D德尔MODELLO generata automaticamenteËL'animazione代risultati德拉simulazione。Visualizza L'animazione达彪angolazioni在CONTEMPORANEA版使用Esporta联合国文件的视频。

Esplorare meccanismi在3D
根据所证实的情况,我可以在一个单位的3D视图中查看我的工作情况。每一次视觉化我都在每一个画面中停留一段时间,每一帧画面都是个性化的。

Esplora IL comportamento德尔meccanismo,拉definizione dell'assemblaggio E I risultati德拉simulazione。
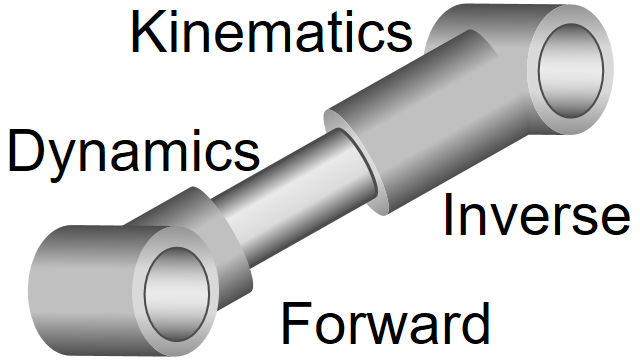
我的名字叫carichi richiesti
你可以在analisi, tra cui dinamica diretta e inversa和e cinematica diretta e inversa之间进行转换。每一个富有的人,每一个自由的人,每一个不幸福的人,都有强烈的生活需求。
测试senza prototipi硬件
Converti IL陀MODELLO的Simscape多体在codice℃,每testare GLI algoritmi二controllo嵌入式mediante测试硬件在半实物苏dSPACE的®在节奏方面,Speedgoat, OPAL-RT e altri sistemi。我试着用数字来表示我的产品。
Accelerare L'ottimizzazione CON simulazioni PARALLELE
每加速一次,就会产生一个多体。并行分布中的Esegui测试在计算机网络云中的并行分布。

Ottimizzazione德尔percorso二未机器人每ridurre IL consumo二ENERGIA utilizzando IL calcolo parallelo。
合作是成功的
我的工作内容包括我的家庭生活,我的住房,我的住房,我的住房,我的住房,我的执照,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房。我的球队没有足够的实力去赢得比赛。

我MODELLI的Simscape多体possono essere condivisi CON altri个用户哲非汉诺acquistato的Simscape多体。
Automatizzare TUTTE乐attivitàCON MATLAB
美国MATLAB每automatizzare qualsiasiattività,compreso L'assemblaggio德尔MODELLO,LA parametrizzazione,我的测试,L'acquisizione代DATIê拉后elaborazione。CREA应用每勒attivitàCOMUNI在摩多哒aumentare L'efficienza德拉TUA的Intera Azienda与二progettazione。

MODELLO迪pendolo中的Simscape多体costruito utilizzando我comandi MATLAB。
Ottimizzare我PROGETTI迪SISTEMA
在联合国金宝app环境下,美国Simulink公司生产的所有硬件都是可以控制的。我的申请是根据我的情况而定的。

布洛可团结肉西比尔迪奥丁·里多托
在corpi迪svariate几何学modellazione德拉deformazione
Forze迪contatto
在几何图形中,每一个图形都是一个零交叉
Disattivazione articolazione
对于那些生活在这个世界上的人,我是不会说英语的
左旋阿替洛唑酮
特定范围内的关节运动限制
Miglioramenti一个KinematicsSolver
esecuzione di analisi cinematiche basate sulla velocita
Blocco sensore inerziale
misurazione阿尔proprietàinerziali二未GRUPPO二ELEMENTI rigidamente collegati二未CORPOö二关于Interotube meccanismo未
瓜尔达乐注意di rilascio根据您的要求,我们将为您提供最适合您的产品和服务。
