。
2-DOF PIDコントローラーの调整(コマンドライン)
この例では,2自由(2-DOF)PIDコントローラーをコマンドラインで设计をを示します示しまたまたまた示し示し示します示し示し示し示し示しコントローラー性能性能性能をを性能性能をををを性能性能をコントローラーコントローラーコントローラーコントローラーされれている性能ととします。
2-DOF PIDコントローラーには,比例项およびおよびおよびに设定点の重みが含まれいます.1-dof pidコントローラーと比较,2-dof pidコントローラーコントローラーで,设定点の追従オーバーシュートを大大幅加入さた外乱なく达达成さます.2-dof pidコントローラーを使し典型的な制御アーキテクチャをの図制御アーキテクチャを次図に示し。

このこの例で,次の式で与えられるの2-dofコントローラーを设计します。
![]()
システムでターゲットとする帯域ををを1.5 rad / sとします。
WC = 1.5;g = tf(1,[1 0.5 0.1]);c2 = pidtune(g,'pid2',厕所)
C2 = 1 u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y) s with Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0 Continuous-time 2-DOF PID controller in parallel form.
タイプ'pid2'を使用すると,Pidtune.により2-DOFコントローラーコントローラー生成され,PID2.オブジェクトとして表现さます。Pidtune.は,设定点の重みB.およびCをを含めてすべてのコントローラーを调整し,性能性能とロバスト性のバランスを取り
,2-DOF PIDコントローラーが2入力1极力の动的システムことこと注意しください。コントローラーコントローラーは示すにとおりますますにに示す,1つは基调信号,もう1つはフィードバック信号のチャネル(详细は,连続时间2-DOF PIDコントローラーの表现を参照してください)。

コントローラーをコンポーネントCR.およびCY.に分享し,R.からyへの闭ループ応答の计算计算使使使。
c2tf = tf(c2);CR = C2TF(1);CY = C2TF(2);T2 = CR *反馈(G,CY,+ 1);
外乱のの抑制のの性能をにに,D.からyへへ达达关关数を计算し。
S2 =反馈(G,CY,+ 1);
比较のため,同じ帯域幅の1-dof pidコントローラーを设计し,対応する伝达关键をします。
c1 = pidtune(g,'PID',厕所);t1 =反馈(g * c1,1);S1 =反馈(G,C1);子图(2,1,1)Stepplot(T1,T2)标题('参考跟踪')子图(2,1,2)Stepplot(S1,S2)标题(“干扰拒绝”) 传奇('1-DOF'那'2-DOF')

プロットでは,2つ目の自我度度追する,外交の抑制を犠牲にず设定値追従でのオーバーシュート除去さことがれてますささがれてい。设计福克斯オプションを使使て改善できます。このこのオプション,Pidtune.は设定点の追従よりも乱のを优先ようようにます。
选择= pidtuneOptions('designfocus'那“骚扰 - 拒绝”);c2dr = pidtune(g,'pid2',WC,选择)
C2dr = 1 u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y) s with Kp = 1.72, Ki = 0.593, Kd = 1.25, b = 0, c = 0 Continuous-time 2-DOF PID controller in parallel form.
バランスバランスを取ったた既定の设计フォーカスの合,Pidtune.はB.の値を0と1の间で选択しますこので,设计フォーカスを変更してての抑制优先するすると,Pidtune.はB.= 0およびC= 0に设定します。このこのよう,Pidtune.はi-pdコントローラーを自动生成し,外乱の抑制にに最适し(设计フォーカスを设定ず,明显的にi-pdコントローラーを指定しも,同様のコントローラーが生成さされれれます)。
3つのつのコントローラーをすべて使使ししししししし
c2dr_tf = tf(c2dr);cdr_r = c2dr_tf(1);cdr_y = c2dr_tf(2);T2DR = CDR_R *反馈(G,CDR_Y,+ 1);s2dr =反馈(g,cdr_y,+ 1);子图(2,1,1)Stepplot(T1,T2,T2DR)标题('参考跟踪')子图(2,1,2)Stepplot(S1,S2,S2DR);标题(“干扰拒绝”) 传奇('1-DOF'那'2-DOF'那'2-DOF拒绝焦点')
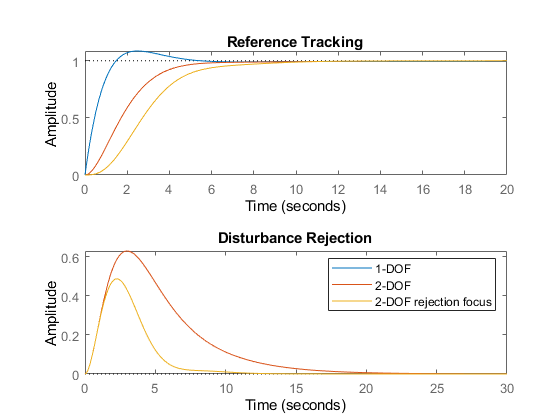
プロットでは,バランスの取れた2-dofコントローラーと比较して,外乱のの抑制がさらに改善さていることがが示さていいいますますにますはますはは追従追従追従がが値値性能性能性能性能性能性能性能上性能性能性能性能の,この结合も,设定この追従,设定値追従応答にオーバーははません。
したがって,2-DOF制御をを使こと,设定値追従の性能をことことなくなくなくの抑制を改善できできシステムの性能に対するこれらをの效果できできますなく性能に対する抑制これらの效果はますます乱乱に対するこれらのの效果はますますの性能に対するこれらこれらの效果はますます。
参考
关键词トピック
您还可以从以下列表中选择一个网站:
