センサー モデル
加速度計、磁力計、ジャイロスコープ、高度計、GPS、IMU および距離センサーについて、センサーのモデリングとシミュレーションを実行します。センサーの読み取り値、センサー ノイズ、環境条件およびその他の構成パラメーターを解析します。軌跡を生成して、ワールド内でのこれらのセンサーの移動をエミュレートし、センサーのパフォーマンスのキャリブレーションを行います。
复数の融合する,または他位置アルゴリズムを使用する场合は,位置推定と姿勢推定を参照してください。
関数
オブジェクト
gnsssensor |
模拟GNSS以生成位置和速度读数 |
altimeterSensor |
高度计仿真模型 |
GPSSENSOR |
GPS接收器仿真模型 |
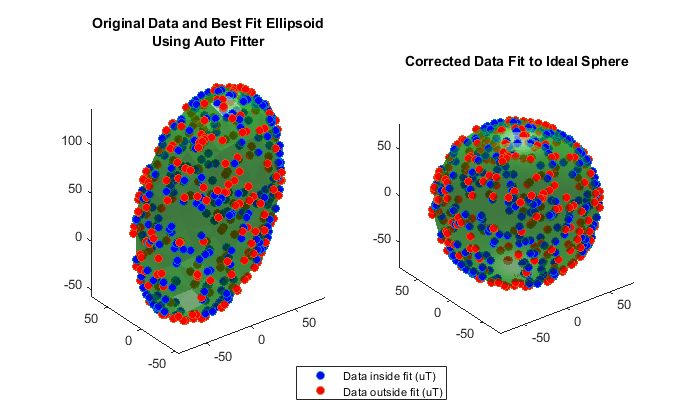
imusensor |
IMU仿真模型 |
insSensor |
惯性导航系统和GNSS/GPS仿真模型 |
Rangesensor |
Simulate range-bearing sensor readings |
wheelEncoderUnicycle |
模拟独轮车的车轮编码器传感器读数 |
WheelencoderBicycle |
Simulate wheel encoder sensor readings for bicycle vehicle |
wheelEncoderDifferentialDrive |
Simulate wheel encoder sensor readings for differential drive vehicle |
Wheelencoderackermann |
模拟Ackermann车辆的车轮编码器传感器读数 |
KinematicTrajectory |
Rate-driven trajectory generator |
timescope |
显示时间域信号 |
WaypointTrajectory |
Waypoint trajectory generator |
Nmeaparser |
Parse data from standard and manufacturer-specific NMEA sentences sent from marine electronic devices |
gpsdev |
连接到连接到主机计算机的GPS接收器 |
トピック
- 模型IMU,GPS和INS/GPS
惯性传感器和GPS的模型组合
- Inertial Sensor Noise Analysis Using Allan Variance
此示例显示了如何使用Allan方差来确定MEMS陀螺仪的噪声参数。这些参数可用于在仿真中对陀螺仪进行建模。陀螺仪的测量被建模为:
- Wheel Encoder Error Sources
Explore the various error sources of wheel encoders and how they affect the wheel odometry estimate. After defining a ground truth trajectory, change parameters for wheel radius bias, wheel position noise, wheel slippage, and track width for the various wheel encoder objects. Notice the affects of changing these parameters on the output trajectory from the wheel encoder sensor models.
- 角速度からのバイアス削除削除
この例では、
imufilterを使用して IMU からジャイロスコープのバイアスを削除する方法を説明します。 - Configure Time Scope MATLAB Object
定制
timescope属性和使用测量工具。 - Simulate Inertial Sensor Readings from a Driving Scenario
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™. The
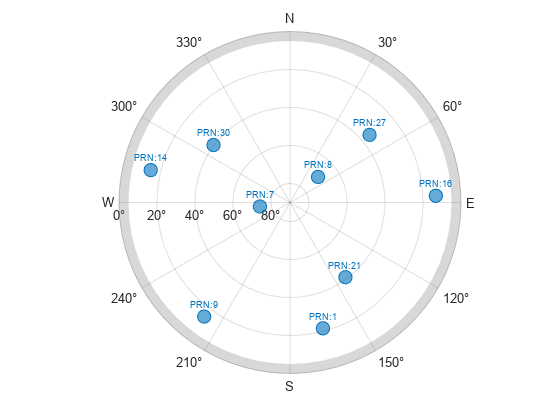
drivingScenario对象模拟驾驶方案和传感器数据是从该方案中生成的imusensor,GPSSENSOR和Wheelencoderackermann对象。 - Analyze GPS Satellite Visibility
This example shows how to simulate and analyze GPS satellite visibility at specified receiver positions and times. Use live script controls to set different parameters for the satellite simulation.
- 模拟GPS传感器噪声
此示例显示了如何使用GPS块将GPS传感器噪声添加到Simulink®中的位置和速度输入。金宝app
- Simulate INS Block
In this example, you simulate an INS block by using the pose information of a vehicle undertaking a left-turn trajectory.