このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
運動の計画
運動の計画を使用して,環境内を通るパスを計画します。RRT, RRT *,混合*などの一般的なサンプリングベースのプランナーを使用するか,独自のカスタマイズ可能なパス計画インターフェイスを指定することができます。パスメトリクスと状態検証を使用して,パスが有効であり障害物とのクリアランスまたは滑らかさが適切であることを確認します。単純追跡と向量场直方图アルゴリズムを使用して,パスを追従し障害物を回避します。
関数
トピック
详细介绍了不同路径和运动规划算法的好处。
这个例子展示了如何使用快速探索随机树(RRT)算法来规划通过已知地图的车辆路径。特殊的车辆约束也应用于自定义状态空间。您可以为任何导航应用程序使用自定义状态空间和路径验证对象来优化您自己的规划器。
这个例子展示了如何规划一个路径来移动笨重的家具在一个狭窄的空间避免杆。这个例子展示了一个“Piano Mover’s Problem”的工作流程,它用于测试带有约束状态空间的路径规划算法。本示例使用plannerRRTStar对象实现自定义优化快速探索树(RRT*)算法。提供的示例助手演示了如何为任何运动规划应用程序定义自定义状态空间和状态验证。
计划一个抓握动作Kinova Jaco辅助机器人手臂使用快速探索随机树(RRT)算法。这个例子使用了plannerRRTStar对象来采样状态并规划机器人的运动。提供的示例助手演示了如何为运动规划应用程序定义自定义状态空间和状态验证。
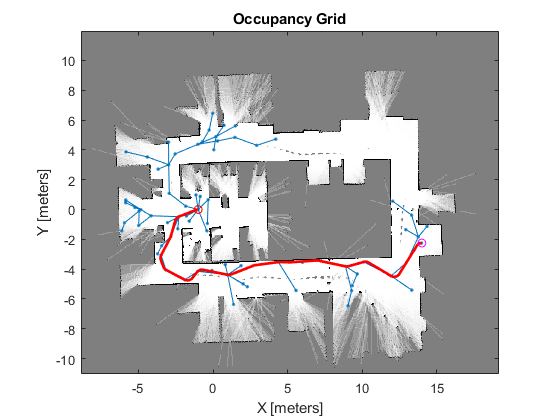
这个示例展示了如何使用测距仪和a *路径规划器对仓库地图执行动态重新规划。
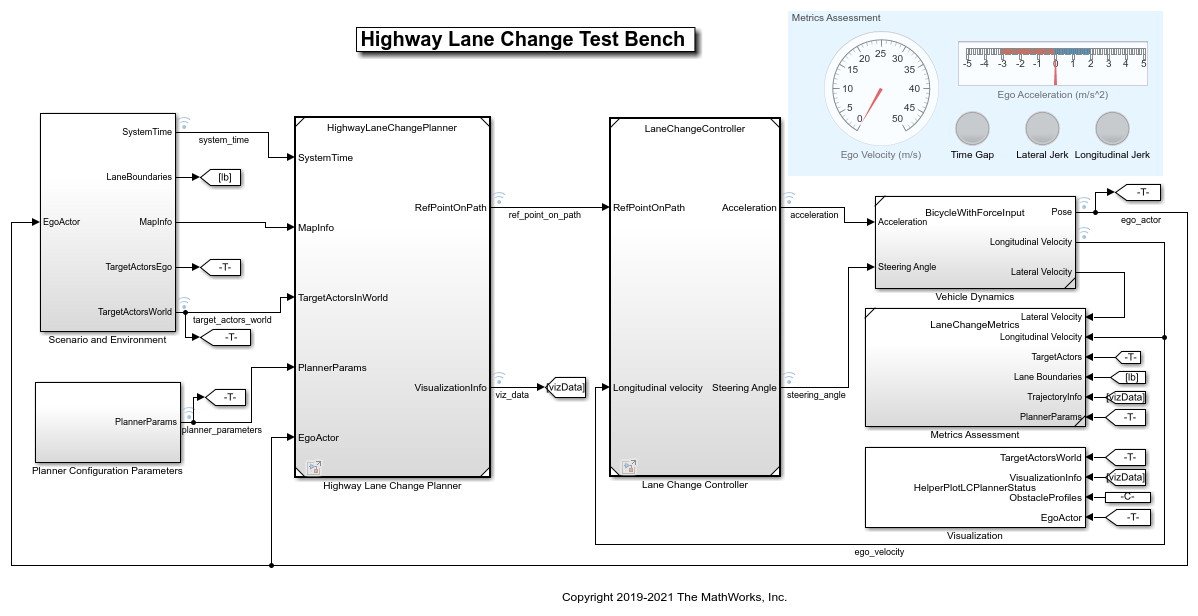
这个例子展示了如何模拟自动变道机动系统的公路驾驶场景。
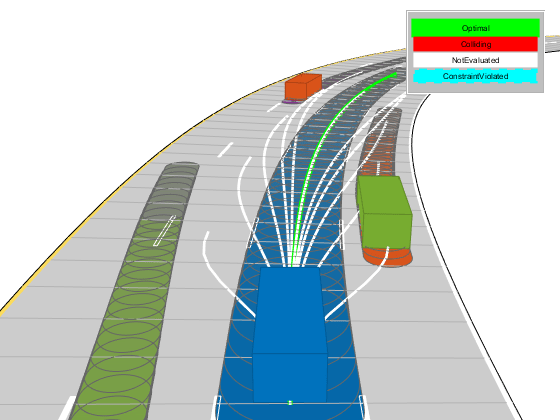
这个示例演示了如何在高速公路驾驶场景中规划局部轨迹。这个例子使用参考路径和动态障碍列表来为自我飞行器生成替代轨迹。自我车辆导航通过在提供的驾驶场景中定义的交通drivingScenario对象。基于成本、可行性和无碰撞运动,车辆在自适应巡航控制、变道和车辆跟随机动之间进行切换。
这个例子展示了如何在城市场景中使用trajectoryOptimalFrenet。
这个示例向您展示了如何使用Frenet参考路径在城市驾驶场景中执行动态重规划。在本例中,您使用局部环境的动态占用网格地图估计来找到最优的局部轨迹。
这个例子向您展示了如何使用Simulink来避免障碍,同时遵循一个差金宝app动驱动机器人的路径。本例使用ROS从基于MATLAB®的模拟器发送和接收信息。您可以用其他基于ros的模拟器替换模拟器,如Gazebo®。
这个例子展示了如何使用ROS工具箱和带有矢量场直方图(VFH)的TurtleBot®来执行在环境中驾驶机器人时的避障。机器人向前行驶,直到遇到障碍物为止。的controllerVFH对象计算方向以避免在试图前进时的对象。
VFH算法细节和可调属性。
単純追跡コントローラーの機能とアルゴリズムの詳細。
注目の例

你也可以从以下列表中选择一个网站:
