。
PCFitplane.
3次元点群への平衡の近似
构文
说明
模型= PCFitplane(ptcloudin那Maxdistance.)
この关节,M估算器样本共识(MSAC)アルゴリズムアルゴリズム使使してををしますますますますますます.MSACアルゴリズムは,随机样本共识(RANSAC)アルゴリズムアルゴリズムバリアントです。
模型= PCFitplane(ptcloudin那Maxdistance.那参考矢量)参考矢量入力又加入の向の制约がれている点群に面近似近似近似し近似し
模型= PCFitplane(ptcloudin那Maxdistance.那参考矢量那maxangulardistance.)
[は,点群入力のインライア点と外れ値点の線形インデックスを追加で返します。模型那inlierindices那uterierindices] = PCFitplane(ptcloudin那Maxdistance.)
[___那は,前述前述の构构のいずれかを用し,インライア点からモデルの距离平等误差误差追追返し返し返し意思是] = PCFitplane(ptcloudin那Maxdistance.)
[___] = PCFitplane(は,1つ以上のptcloudin那Maxdistance.那名称,价值)名称,价值ペアの引数によって指定された追加オプションを使用します。
例
点群からの复数の平等の検出
点群を読み込みます。
加载('Object3d.mat')
点群を表示しラベルを付けます。
图pcshow(ptcloud)xlabel('x(m)') ylabel ('y(m)')Zlabel('z(m)') 标题('原始点云')

平台近似近似に点点までの最大大(2厘米)を设定します。
maxdistance = 0.02;
平面の法線ベクトルを設定します。
参考矢量= [0,0,1];
最大角距离を5度に设定ます。
maxangulardistance = 5;
最初の平衡であるテーブルを検出して,点群から抽出します。
[Model1,Inlierindices,OutierIndices] = PCFitplane(PTCloud,......Maxdistance,CaperencVector,Maxangulardistance);Plane1 = SELECT(PTCLOUD,INLIELINDICES);保留= select(ptcloud,countierindices);
关联领域を设定し2番目の平等である左壁の探索范囲をを制ますますししますししますますますししし
ROI = [-inf,INF; 0.4,INF; -INF,INF];Sampleindices = findpointsinroi(仍然是vTond,ROI);
残りの点群点群から左左壁を検出しして抽出し
[model2,Inlierindices,OutierIndices] = PCFitplane(保留了vercloud,......maxDistance,'Samemindices',样品暗物典);Plane2 = SELECT(保留为止,INLIERINDICES);保留= SELECT(保留为止,outlierIndices);
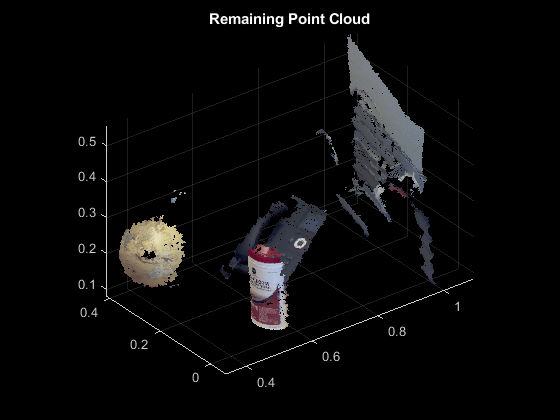
2つの平面と残り点点プロットします。
图pcshow(平面)标题('第一架飞机')

图pcshow(平面)标题('第二架飞机')
图pcshow(保留了)标题('剩下的点云')
入力数
出力数
参照
[1] Torr,P.H. S.和A. Zisserman。“MLESAC:一种具有应用于估计图像几何的新的强大估算器。”计算机愿景和图像理解。2000年。
拡张机械
参考
Affine3d.|pcdenoise.|pcfitcylinder|PCFitsphere.|pcmerge|PCPlayer.|p|Pcregistericp.|pcshow|pctransform|pcwrite|PlaneModel.|pointcloud.
トピック
您还可以从以下列表中选择一个网站:
