现在我们已经验证了我们的控制器和工业模拟,我们已准备好部署到嵌入式微控制器。如果您记得我们正在使用TIC 2000电机来控制套件,以及从标准的电机控制箱生成的代码,即ANSI C代码,这意味着您可以针对任何处理器。在这种情况下,该参考示例显示了如何将模型分区,使算法包到单独的模型中,它与ABC和位置传感器测量和PWM右独放。因此,这里的关键点是您可以生成节奏代码,包括当前和ISP将控制和将此代码集成到电机控制应用程序中。因此,拍摄每个错误代码的好处是,您可以交换代码并传递给另一个目标处理器。
因此MathWork提供了TIC 2000硬件的支持包,用于生成嵌入式代码。金宝app它是免费的广告,硬件支持包。金宝app并且,我个人对唯一对生成Mystikal的客户有顾客,他们希望将其融入串行端口传输中的IO驱动程序的现有传统遗留。我们还有客户喜欢生成整个代码,包括IO驱动程序盒,或PWM输出和ABC数字IO反馈。因此,在TIC 2000支持包库中,我们还有许多选择优化的块用于生成金宝app效率代码。所以现在我们将看到如何将算法部署到TIC 2000微处理器。
我们可以自动生成浮点或固定点代码,将模型下载到目标并传递它。这是我们的模型。这与我们之前在仿真中验证的模型完全相同。现在我们将从控制算法中生成一个代码我打开样本。所以你可以看到她的手指是如何变成棕色的还有跳跃的速度比这个慢现在我开始了共生过程。我们的错误和驱动程序代码都会生成。然后在处理器上编译和下载。正如我们在发电报告中所看到的,所有的煤炭都是开放的,我们可以获得我们有大约4000条ziko线。
现在我们打开主机模型。请注意,我们有MEPA弱化控制已成为永久性。因此,我们有能力转向现场弱化控制并开始停止多能。我们也可以发表演讲,我们还能够观察反馈的信号。现在我们开始开始运行电机。这就是我们如何设置的现在我向您展示了如何将500 rpm的速度提高到4,000 rpn。而Base B注意我在这里向您展示助理系统。因此,如果必须每单位达到一个,这与该基地B靠近B.
我们可以看到速度轨迹很好地出现在这一拍中。然而,当我们试图达到5000 RPM时。这是超出基地之前的一些东西。你会看到速度反应在不能跟着黄线因为我们还感觉不到控制的减弱。现在我们正在检查IP信号。来验证进来的小偷还是零。现在,我希望能够进行弱化控制。所以所有的反馈都是消极的看看速度反应是如何反应的
每个单位上面。所以现在您可以通过操纵ID货币引用来查看响应可以以上按照上面的每单位跟踪。
所以另一个关于电机控制的交叉说,您还可以使用循环中的处理器来通过嵌入式编码器测试功能。所以它所做的是桌面仿真,您可以看到在目标上运行的控制代码并使用电机模拟。逆变器模型顺利运行。这真的有助于在目标处理器上测试生成器代码。您还可以做代码编程。如果您记得我们一直在谈论方向控制的一个变化,以高简单的速率运行50微秒。所以它非常有效。在这种情况下,您可以看到我们的控制电流控制仅需要5微秒,这非常高效或15微秒简单。使用Simulin金宝appk,您还可以针对您的FPGA。如果您需要快或简单。 We have examples showing you how to automatically generate the HDL and implement your motor control FGPAs.
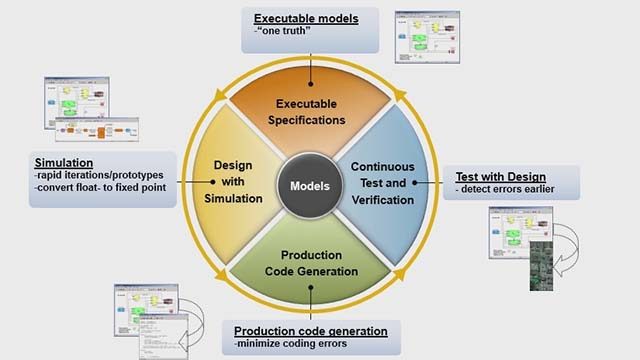
总结一下,我们已经完成了福特电机控制的整个工作,处理器确证,电机参数估计,功率建模控制设计,生成和实现。正如你在这里看到的,基于电机控制覆盖了整个端到端工作流。为了建模电机和逆变器,我们介绍了simscap电气,以允许您建模您的物理模型的不同视频。出于设计控制的原因,我们讨论Simulink控制设计来帮助您分析和查看视频增益。金宝appNassp另一个列表的嵌入式编码器与固定点设计器工具箱,允许您生成高效的代码,而无需任何目标微处理器。希望通过这些功能,您可以加快电机控制应用程序的开发过程。