NXT SCARA是由乐高Mindstorms NXT建造的双连杆平面机械臂。SCARA是选择性兼容装配机械臂的缩写。请参考以下网址了解更多关于SCARA的详细信息。
http://en.wikipedia.org/wiki/SCARA
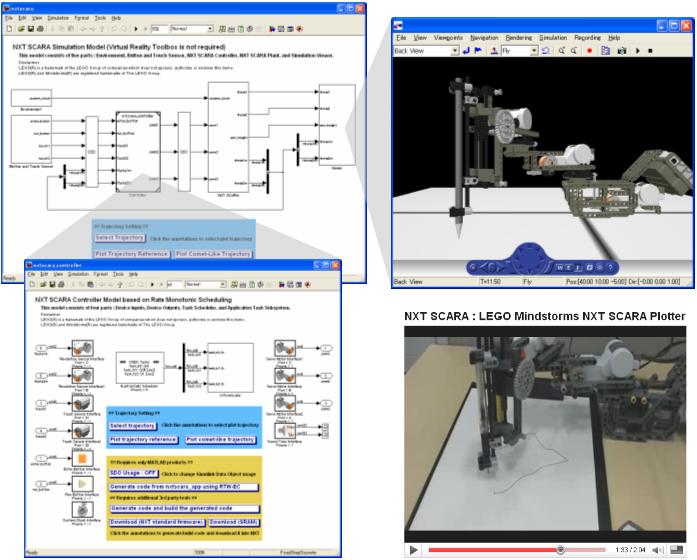
这个演示展示了示例模型,文档描述了以下内容。
如何构建NXT SCARA
几何模型与逆运动学
轨迹进行
跟踪控制控制器设计
NXT SCARA模型说明
仿真与实验结果
您可以模拟NXT SCARA模型并生成可以在NXT上执行的控制器程序。此外,您可以在以下URL观看NXT SCARA模拟和控制实验的电影。
http://www.youtube.com/watch?v=kanmZErt4io
http://www.youtube.com/watch?v=7F2H19teyMY
这个演示需要嵌入式编码机器人NXT demo作为MBD环境。在尝试这个演示之前,您需要从下面的URL下载它。
//www.tatmou.com/matlabcentral/fileexchange/13399
<免责声明>
乐高(R)是乐高集团公司的商标,不赞助、授权或认可本演示。LEGO(R)和Mindstorms(R)是乐高集团的注册商标。
引用作为
山本约久(2023年)。NXT SCARA (Two-Link Planar Robot Arm)控制器设计(//www.tatmou.com/matlabcentral/fileexchange/22126-nxt-scara-two-link-planar-robot-arm-controller-design), MATLAB中央文件交换。检索.
MATLAB版本兼容性
使用R2007b创建
与任何版本兼容
平台的兼容性
窗户 macOS Linux标签
nxtscara /模型/
nxtscara /模型/
您也可以从以下列表中选择一个网站: