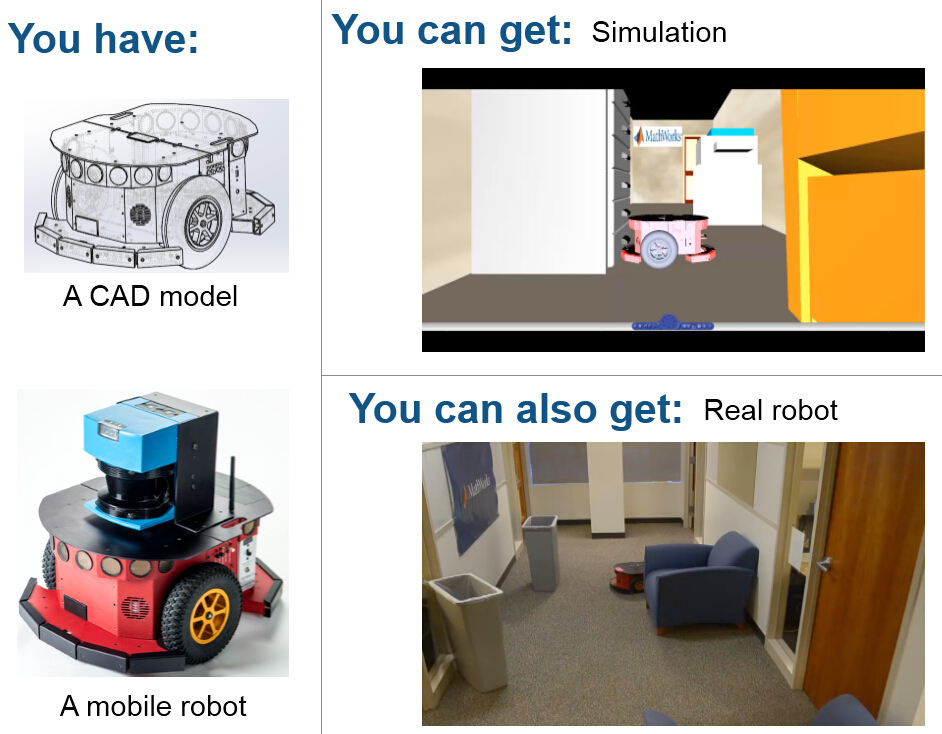
基于Simulink的移动机器人避碰仿真金宝app
此提交包含此网络研讨会中使用的Simulink模型金宝app和CAD文件:<使用Simulink>避免碰撞的移动机器人仿真>。您可以在这里观看网络研讨会://www.tatmou.com/videos/mobile-robot-simulation-for-collision-avoidance-with-金宝appsimulink-90193.html.
示例1:由重力驱动的先驱3DX机器人的SimMechanics模型
文件(s): Pioneer3DXAssembly。SLX(以金宝app下支持文件)
示例2:Pioneer 3DX机器人具有角速度致动的先驱3DX机器人的兴趣模型
文件(s): Actuated_Pioneer3DXAssembly。SLX(以金宝app下支持文件)
例3:具有运动约束的Pioneer 3DX机器人SimMechanics模型
文件:motionconstraints_pioneer3dxassembly.slx(支持下面的文件金宝app)
金宝app支持示例1,2和3的文件:
文件(s): SimMechanics_Su金宝apppporting_Files.zip
例4:先锋3DX机器人在虚拟环境中执行Simulink 3D动画的SimMechanics模型金宝app
文件:sl3danim_pioneer3dxassembly.slx(支持下面的文件金宝app)
示例5:先锋3DX机器人的SimMechanics模型在虚拟环境中使用statflow进行碰撞避免,并在Simulink 3D动画中可视化金宝app
文件:controller_pioneer3dxassembly.slx(支持下面的文件金宝app)
金宝app支持示例4和5的文件:
用于3D动画可视化的VRML文件:
SL3D_S金宝appupporting_Files.zip
查表数据:
WorldLUTData.mat
示例6:Simulin金宝appk模型与先驱3DX机器人交互以进行碰撞(支持下面的文件)金宝app
文件:main_demo_real_robot.slx
金宝app示例6的支持文件:
ARIA 金宝appSimulink Library (Pioneer3DX_Simulink_Library.zip)
重要提示:
1.这些例子仅在MATLAB 8.2(R2013B)或更高版本中工作
2.一旦支持支持文件,将金宝app文件夹和子文件夹添加到MATLAB路径
3.示例1,2和3需要MATLAB,SIMULINK和SIMMENECHICS金宝app
4.示例4和5要求MATLAB,Simulink,SimMechanic金宝apps和Simulink 3D动画
5.示例6需要MATLAB,SIMULINK和StateFl金宝appow
引用作为
Mathworks机器人和自治系统团队(2021)。基于Simulink的移动机器人避碰仿真金宝app(//www.tatmou.com/matlabcentral/fileexchange/47208-mobile-robot-simulation-for-collision-avoidance-with-金宝appsimulink), MATLAB中央文件交换。检索.
评论和评级(19)
Matlab释放兼容性
平台的兼容性
视窗 苹果系统 Linux类别
标签
您还可以从以下列表中选择一个网站:
这是一个很好的演示,但有人可以给我关于运动约束模型中运动子系统的解释吗?
我真的不明白数学原则。
谢谢你!
这就跟你问声好!我认为Pioneer3DX_Simulink_Libra金宝appry.zip支持文件丢失了。金宝app你能上传丢失的文件吗?
我的意思是,没有数据文件,形状就无法显示
嘿
我正在使用MATLAB源的此示例。
请您点击链接波纹镜头。(使用Simulink避免冲突的移动机器人仿真)金宝app
//www.tatmou.com/matlabcentral/fileexchange/47208-mobile-robot-simulation-for-collision-avoidance-with-金宝appsimulink
在这里,我正在使用此许可的源来开发具有虚拟迷宫环境的移动机器人,以避免障碍物,在这种环境内部。差异只是迷宫设计和尺寸。
当我使用这个查找表来我的设计,机器人的行为就像运行在Matlab源代码提供的环境。
问题是我如何根据我的迷宫设计生成查找表,使机器人在不穿过迷宫虚拟墙的情况下避开障碍,在迷宫中奔跑。
换句话说,MathWorks支持团队设计如何查找表2001x12001双倍。金宝app文件名称worldlutdata.mat
它是基于虚拟环境的维度还是从VRLM设计中提取出来的?
非常感谢
非常感谢这个伟大的项目。
如果我们想在现实世界中应用这个项目
请问arduino怎么申请?
非常感谢
你好,
这真的是一个惊人的演示,我把CAD文件变成了我的机器人,修改了代码来调整我的硬件。XD
你好
谢谢你的这些例子,它真的对我有帮助。然而,我有一些问题,我希望有人能帮助我
1.你建模的声纳在机器人的CAD模型中存在吗?如何添加更多的传感器?
2.如何更改机器人在虚拟世界中的初始位置?
3.如果我需要控制这个机器人,以便它进入它的环境中(x,y)给出的点,我应该改变什么?
谢谢
你好
我无法读取“worldlutdata.mat”文件。有人可以帮助我吗?
为任何CAD模型创建仿真的优秀示例。
如何在64位环境中运行“main_demo_real_robot.slx”模型?
当我尝试运行模型时,出现了几个mex文件错误。(图书馆/ SFuncs /)
你能告诉这个模型的编译选项吗?
谢谢你的伟大视频。非常感激。
我有一个问题。你是如何得到的.mat文件?它来自.wrl-file?如果是,你如何获得该文件?
我改变了机器人的环境。但我不知道如何获得.mat文件。
如果你能解释一下如何将它导入到模型工作区,我也会很感激。因为我一直得到这个错误:Undefined函数或变量'World_LUT'
谢谢提前
在例子2中,如果我改变轮子的角速度,机器人没有反应,你能解释一下吗?
你好
我目前正在尝试将这个示例应用于另一个定制环境:您能不能给我一些提示,告诉我在哪里可以找到关于如何生成适合虚拟世界的定制查找表的信息?这可以自动完成吗(更改WRML会动态地更改查找表)?不好意思,如果没有正确的地方问,请让我知道是否有更合适的地方张贴?非常好的网络研讨会!
非常好
非常好