使用Simulink和SimMechanics的多四旋翼控制金宝app
version 1.1.0.0 (3.6 MB) by
穆罕默德Abdelkader Zahana
为PID控制的多旋翼飞行器的仿真提供了良好的可视化环境。
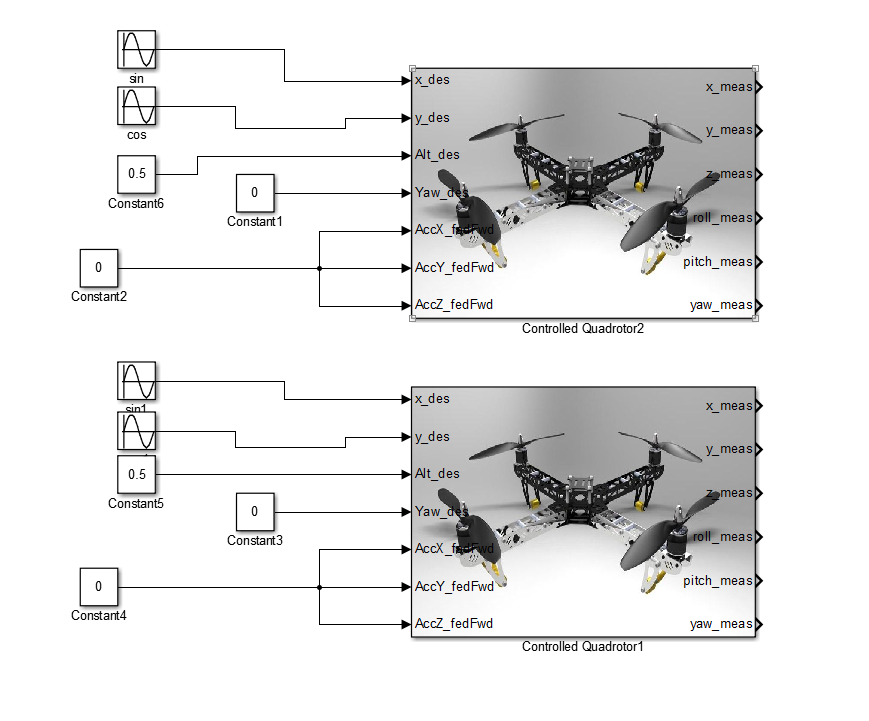
该模型结合了Simulink建模和SimMechanics的强大功金宝app能,开发了一个由简单PID循环控制的多旋翼机的逼真和吸引人的可视化。四旋翼是在Solidworks中设计的,所有的质量和惯性属性都在这里定义,然后导出到XML文件供SimMechanics读取。通过对一对嵌套的PID环进行一些整定,利用四旋翼的线性化模型和MATLAB中的PID整定工具,四旋翼能够平滑地跟踪一些实时轨迹。然后,这被集中在一个块中,所以它可以代表一个独立控制的四旋翼,与参考输入(X/Y/高度全球位置和偏航)需要跟踪,以及一些输出,以供进一步分析。这个块可以复制尽可能多的次数,因为机器的计算能力可能允许,做多agent控制独立的四旋翼。我希望这对你有所帮助!
这是一个快速视频,它看起来像什么。
https://www.youtube.com/watch?v=0bS-ic3Ox5k
请随时与我联系。
注意:确保您阅读了要求。
引用作为
Mohamed Abdelkader Zahana(2021)。使用Simulink和SimMechanics的多四旋翼控制金宝app(//www.tatmou.com/matlabcentral/fileexchange/50065-mulit-quadrotor-control-using-金宝appsimulink-and-simmechanics), MATLAB中央文件交换。检索.