Matlab和Simu金宝applink Robotics Arena:ROS控制应用程序
版本1.1(226 KB)
Mathworks学生比赛团队
用于移动机器人应用的Matlab应用程序与ROS。
此条目包含Matlab应用程序安装程序,用于Matlab和Simulink Robotics Arena的“Matlab应用程序”。金宝app
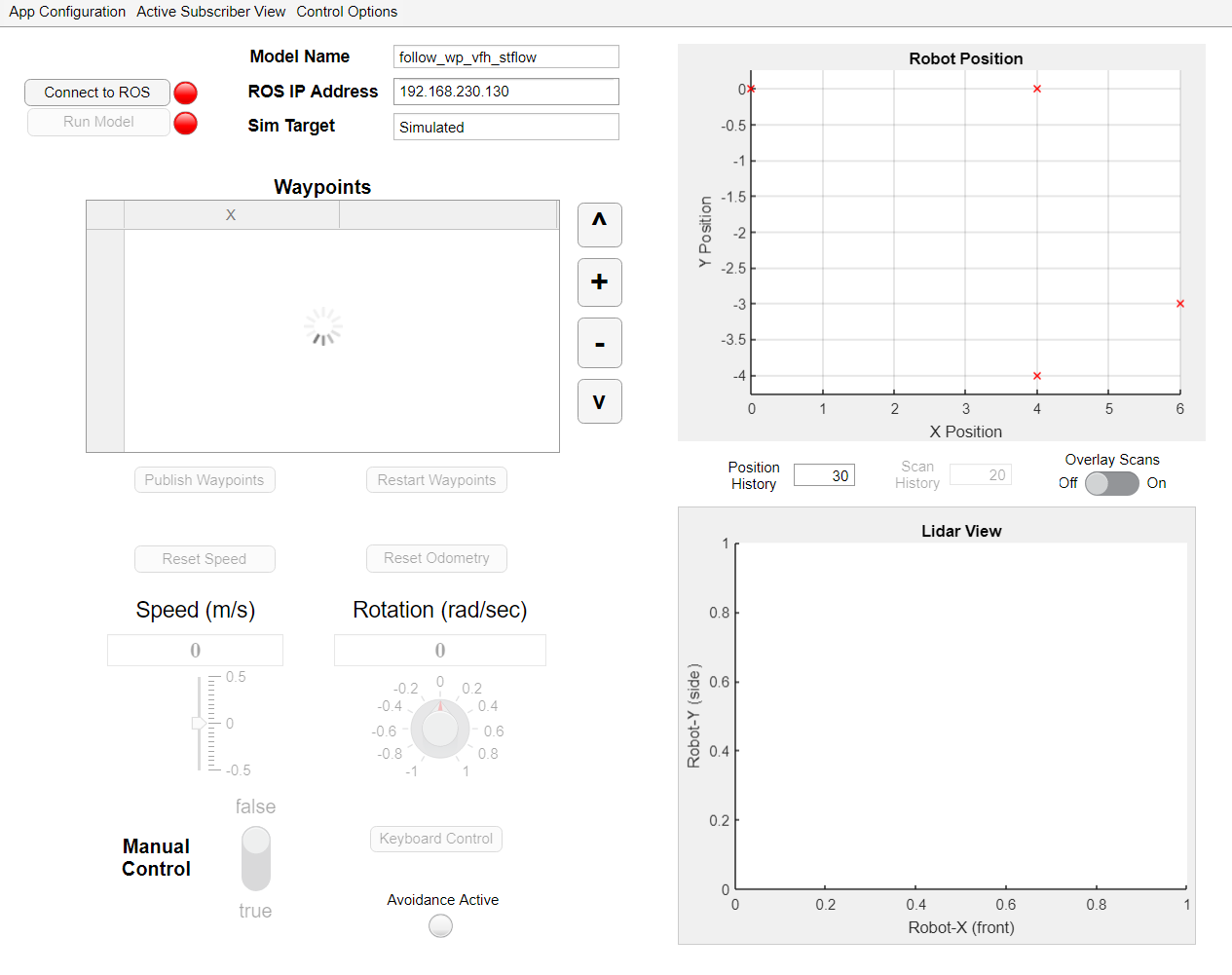
此示例显示App Designer和机器人系统工具箱如何允许您开发使用机器人操作系统(ROS)进行通信的交互式MATLAB应用程序。
引用
Mathworks学生比赛团队(2021年)。Matlab和Simu金宝applink Robotics Arena:ROS控制应用程序(//www.tatmou.com/matlabcentral/fileexchange/67257-matlab-and-金宝appsimulink-robotics-arena-ros-control-app),matlab中央文件exchange。检索到。
评论和评级(5.)
Matlab释放兼容性
用R2018B创建
兼容任何释放
平台兼容性
视窗 苹果系统 Linux.标签
您还可以从以下列表中选择一个网站:
事实证明,“布尔”功能是Simulink的一部分,所以也许你没有安装它?金宝app
您可以进入代码并更改“Boolean(0)”以获取“逻辑(0)”或“FALSE”,并且它应该解决该错误。
连接到ROS时,我最终有此错误消息:
ans =.
具有属性的出版商:
主题名称:'/ userspeed'
islatching:1
NumsubScribers:0
MessageType:'geometry_msgs / twist'
用于输入“双”的输入参数的未定义功能“布尔”。
roscontrolapp / configurerosmsgs时出错(第211行)
Rosparam('set','restartwaypoints',boolean(0));
roscontrolapp / connecttorosbuttonpushed错误(第741行)
configurerosmsgs(应用程序);
使用matlab.ui.control.internal.controller.componentcontroller / executeusercallback(第335行)时出错
评估按钮时出错PrivateButtonPushedFCN。
我的配置有什么问题,或者该应用程序需要2019B更新?