气动机器人执行器建模
版本1.1.0(8.27 MB)
MathWorks学生竞赛团队
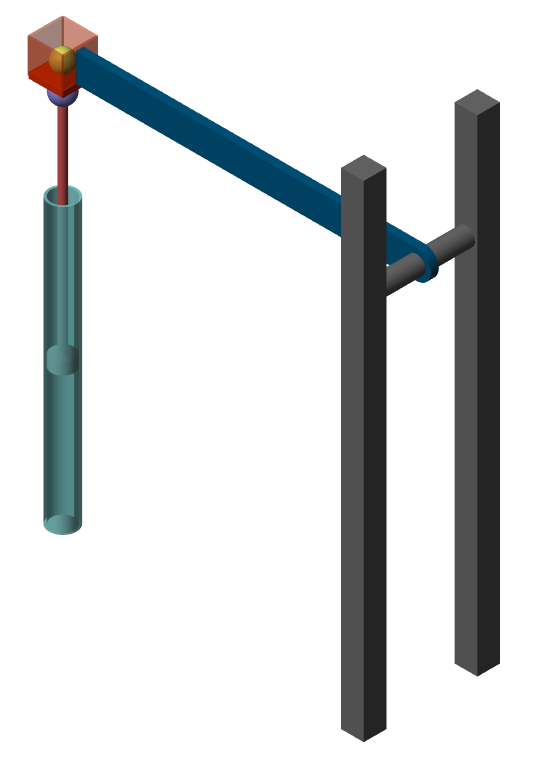
此提交包含使用Simulink,Simscape和Simscape Multibody创建的气动机器人模型。金宝app
这些模型展示了如何构建投掷机制,使得球可以针对某个目标。Simscape和Simscape Multibody已被用来构建完整的系统,最后,PID控制器已用于控制球的轨迹。
本条目中的所有演示都加强了在建模气动机器人执行器系列中回顾的概念。
提交的模型使用了以下库:
1) Simscape多体接触力库
2)Simscape Multibody Multiphysics库
3) Simscape多体部件库
为方便起见,本提交已包含这些库的本地副本。
要安装这些库的最新版本,您可以找到
它们来自附加资源管理器,或者在文件交换中
Simscape多体接触力库://www.tatmou.com/matlabcentral/fileexchange/47417-simscape-multibody-contact-forces-library
* Simscape Multibody Multiphysics库://www.tatmou.com/matlabcentral/fileexchange/37636-simscape-multibody-multiphysics-library
* Simscape多体部件库://www.tatmou.com/matlabcentral/fileexchange/36536-simscape-multibody-parts-library
引用作为
Mathworks学生比赛团队(2021年)。气动机器人执行器建模(//www.tatmou.com/matlabcentral/fileexchange/69331-modeling-pneumatic-robot-actuators), MATLAB中央文件交换。检索.
Matlab释放兼容性
用R2018B创建
兼容任何版本