文件交换
风力涡轮机模型包括叶片、发动机舱,俯仰和偏航驱动,发电机和控制系统。
开发仿真软件设备驱动程金宝app序块:循序渐进的指导和例子
小模型演示了如何控制步进电机Arduino电路板。
基于模糊逻辑的电网连接的多电平逆变器
这个模拟器quadrotor的平移和旋转动力学模型。
滑移模型,包括液压致动器的胳膊,桶倾斜和多体动力学。
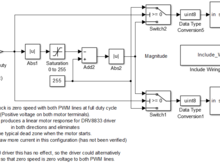
它生成27级的交流输出每阶段。
季度汽车主动制导悬架系统建模与各种道路配置文件
这是一个3自由度机械手臂Simscape模型
Seven-level慢乙肝的研究使用Phased-Shifted和Level-Shifted PWM逆变器
剪刀升降机由参数化库,可重用的组件,液压执行机构。
7-level变频器的变频调速
相淀积技术建立七个级别h桥多电平逆变器
选择性谐波消除上实现H桥转换器
起落架模型,包括主要和锁液压致动器和多体动力学
OptimPID是一个基于MATLAB接口,它可以用来优化PID参数
级联h桥多电平逆变器
13-level变频器的变频调速
模拟磁致动器
h桥逆变器
电动机保护驱动程序块
9-level变频器的变频调速
致动器与理想、液压和电气设计。
级联h桥逆变器
推导出方程,模拟acrobot(双摆)
15水平由SPWM逆变器
五SPWM逆变器的水平
使用ActiveX控件来控制APT Thorlabs定位器
转储拖车模型,包括液压执行器和三维机械模型的剪刀机制。
这个库允许您控制伺服电机Dynamixel Pro (Robotis)从Matlab。
这是高频逆变器,它结合了电容器和级联h桥逆变器
简单的h桥逆变器没有过滤器
从matlab工具箱库卡iiwa控制机器人。
一块从一个位置信号生成速度和加速度。
级联多电平逆变器有21阶段。
这解释了九级联多电平逆变器的水平。
它产生交流输出电压27水平固定电压和固定频率。
两个不同的功能被用作对比前馈的性能。
这包括演示文件中使用的网络研讨会……
11-level变频器的变频调速
模拟液压伺服作动器
金宝app模型比较2的数字pid控制器,当执行机构饱和。
升降台液压驱动,由模拟电路控制,3 d剪刀机制。
5级h桥逆变器
级联h桥多电平逆变器三相模型金宝app
控制模型对基于Bioinspired致动器# MATLABHW2k16肘康复外骨骼
二次规划控制分配工具箱
三相h桥转换器
单腿跳跃机器人的仿真
界面设置新港Agilis UC8 piezo-actuator控制器
使用软PWM直流电机驱动块WiringPi图书馆
线性扩展。
发射方案控制P。E设备——比较正弦载波信号和正弦信号的控制
同伴M-files伴随这本书“电磁作动器和传感器”
级联h桥
3级h桥多电平逆变器
所有的机器人得到相同的输入,但使用壁摩擦引导机器人所需的配置。
ASCII - > Arduino - >领导或压电扬声器
模拟控制律引导多个MRI-powered致动器
这个blockset建模和可视化的微分动力学驱动车机器人。
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站
表现最好的网站怎么走吗
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
美洲
欧洲
亚太地区
联系你当地的办公室