文件交换
在Arduino板上获取输入和发送输出
在Arduino板上运行模型。
获取图像和视频从UVC兼容的网络摄像头。
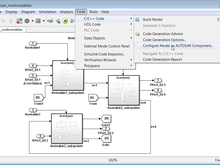
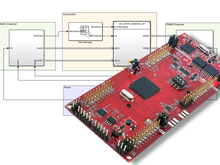
生成C2000单片机优化代码。
使用RTL-SDR获取射频数据。
从通用视频捕获设备获取视频和图像。
从树莓派获取传感器和图像数据。
生成代码优化的意法半导体STM32处理器为基础的板
在树莓派上运行模型。
利用MATLAB和Simulink,利用ADALM-PLUTO对软件定义无线电(SDR)系统进行了原型和测试金宝app
从NI-DAQmx设备获取和分析数据。
使用USRP(R)无线电设计SDR系统。
设计,模拟和部署算法飞行鹦鹉迷你无人机
在Arduino Due上运行模型
为意法半导体STM32 Nucleo板生成和部署代码
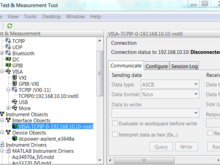
控制仪器采用Keysight (Agilent) VISA。
使用无人机工具箱访问PX4自动驾驶仪外围设备,并使用嵌入式编码器自动构建和部署飞行控制算法
生成针对Cortex-M处理器优化的代码。
从Android设备上的内置传感器获取传感器和图像数据。
在Android设备上运行模型
从符合GenTL标准的摄像机获取视频和图像。
从支持HTTP/RTSP上的MJPEG或RTSP流上的H.264的IP摄像机获取实金宝app时图像。
控制仪器采用NI-VISA。
使用基于Xilinx zynq的无线电设计和原型SDR系统
用PEAK-System CAN设备发送和接收CAN消息。
为汽车系统开发AUTOSAR软件组件。
用矢量CAN设备发送和接收CAN消息。
在苹果iOS设备上运行模型。
从iOS设备上的内置传感器获取传感器和图像数据。
从GigE视觉兼容摄像机获取视频和图像。
在LEGO MINDSTORMS EV3上运行模型。
从测量计算DAQ设备获取和分析数据
控制Ryze Tello无人机从MATLAB和获取传感器和图像数据
设计,分析和原型德州仪器C2000微控制器
为Zynq-7000 SoC的ARM部分生成代码。
NVIDIA GPU支金宝app持从GPU编码器
获取灰点摄像机的视频和图像。
获取传感器数据和控制LEGO MINDSTORMS EV3的输出
为Zynq-7000 SoC的FPGA部分生成代码。
控制和获取NI-SWITCH设备的数据。
控制仪表采用罗德与施瓦茨VISA (R&SVISA)
用于PicoScope 5000系列示波器的MATLAB仪器驱动程序
从Digilent Analog Discovery获取和分析数据。
生成针对ARM Cortex-A处理器优化的代码。
从Kinect获取视频和图像。
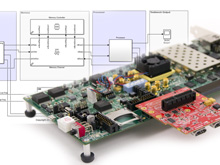
设计,分析和原型赛灵思SoC和FPGA器件
控制鹦鹉无人机从MATLAB和获取传感器数据
MATLAB仪器驱动海洋光学OmniDriver,它支持广泛的光谱仪金宝app
在赛灵思fpga和Zynq soc上调试和测试HDL代码。
从DCAM IEEE 1394摄像机获取视频和图像。
使用USRP E310与MATLAB和Simulink对软件定义无线电(SDR)系统进行原型和测试金宝app
为基于ARM cortex的VEX微控制器生成代码。
用于LeCroy示波器的MATLAB仪器驱动程序,如SDA, WaveMaster, WavePro和WaveRunner
获取和分析来自Windows声卡的数据。
用于PicoScope 4000系列示波器的MATLAB仪器驱动程序(测试版)
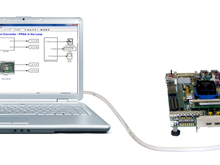
生成代码优化的BeagleBone黑。
设计,分析和原型嵌入式Linux设备
从MATLAB与BeagleBone Black交互
用于PicoScope 3000系列示波器的MATLAB仪器驱动程序(测试版)
使用Total Phase Aardvark I2C/SPI板与I2C或SPI设备通信。
选择网站
选择一个网站获取翻译后的内容,并查看当地的活动和优惠。根据您的位置,我们建议您选择:.
你亦可选择下列网址:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家网站没有针对您所在位置的访问进行优化。
与当地办事处联系