模型预测控制工具箱
设计和模拟模型预测控制器

模型预测控制工具箱™提供了函数、应用程序和Simulink金宝app®块设计和仿真控制器使用线性和非线性模型预测控制(MPC)。工具箱允许您指定植物和干扰模型、水平、约束和权重。通过运行闭环仿真,可以评估控制器的性能。
您可以通过在运行时改变控制器的权重和约束来调整控制器的行为。工具箱提供可部署的优化求解器,还允许您使用自定义求解器。为了控制非线性设备,可以实现自适应、增益调度和非线性MPC控制器。对于具有快速采样率的应用程序,工具箱允许您从常规控制器生成显式模型预测控制器或实现近似解。
为了快速原型和嵌入式系统实现,包括优化求解器的部署,工具箱支持C代码和IEC 61131-3结构化文本生成。金宝app
开始:

免费的技术论文
用Simulink实现自适应巡航控制器金宝app
MPC Designer App.
交互式设计MPC控制器通过定义内部装置模型调整视野、权重和约束条件。使用仿真场景验证控制器性能。比较多个MPC控制器的响应。
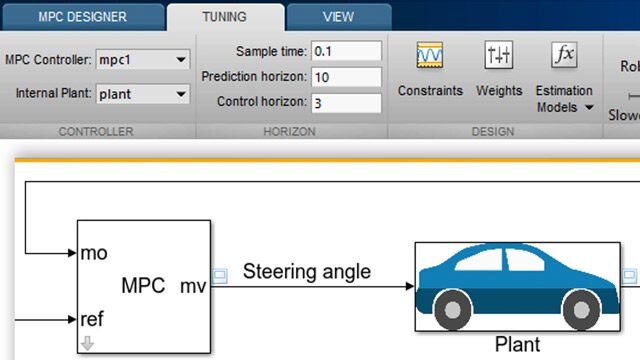
在Simulink中的MPC金宝app设计
在Simulink中使用MPC控制器模块和工具箱提供的其他模块对MPC控制器金宝app进行建模和仿真。修剪和线性化Simulink模型,为MPC金宝app控制器计算一个内部线性时不变的对象模型,并获得对象输入和输出的标称值金宝app仿真软件控制设计™。
MATLAB中的MPC设计
使用命令行功能来设计MPC控制器。定义内部工厂模型;调整权重、约束和其他控制器参数。模拟闭环系统响应来评估控制器性能。

在命令行中设计MPC控制器。
预先构建的块
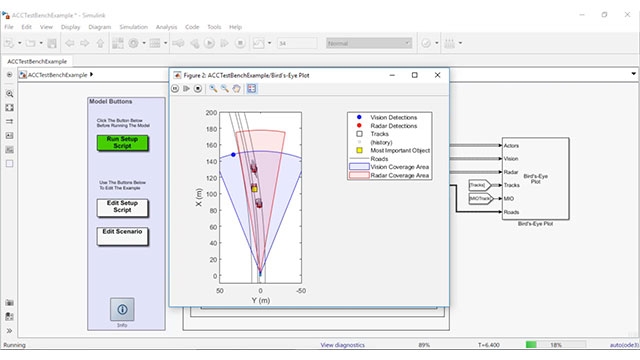
使用自适应巡航控制系统、车道保持辅助系统和路径跟踪控制系统模块作为ADAS应用程序的起点,并根据需要定制设计。为车载部署从预构建块生成代码。

利用预置的Simulink模块设计自适金宝app应巡航控制系统。
参考应用示例
使用参考应用程序示例,通过设计和部署自动驾驶系统的MPC控制器的工作流。参考应用程序示例还向您展示了如何以不同的保真度对系统的不同部分建模。
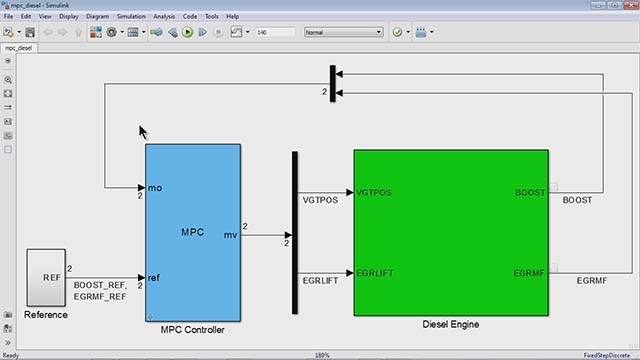
线性MPC
通过使用控制系统工具箱™创建的线性时间不变(LTI)系统指定内部工厂模型,或通过使用Simulink Control Design进行模拟模型来设计线性MPC控制器。金宝app或者,使用系统识别工具箱™导入从测量的输入输出数据创建的模型。

为线性MPC设计指定一个内部工厂模型。
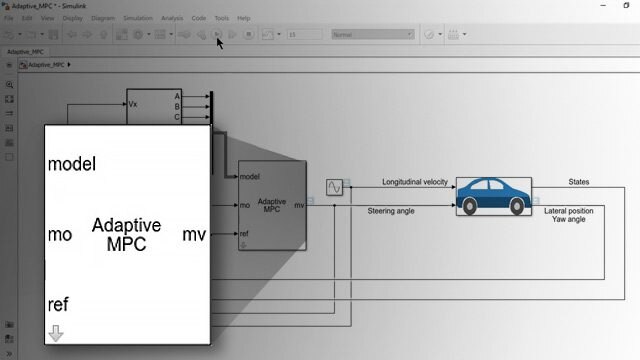
自适应政策委员会
使用命令行函数和自适应MPC控制器模块设计和仿真自适应MPC控制器。在运行时更新工厂模型,并将其作为输入提供给控制器。在自适应模型预测控制器中,采用具有渐近稳定性的内建线性时变(LTV)卡尔曼滤波器进行状态估计。
Gain-Scheduled MPC
控制非线性植物在各种操作条件下,具有多MPC控制器块。为每个操作点设计MPC控制器,并在运行时在控制器之间切换。

采用多MPC控制器模块设计增益调度MPC控制器。


设计回顾
使用内置的诊断功能检测MPC控制器的潜在稳定性和健壮性问题。在控制器设计期间,使用诊断结果来调整控制器权重和约束,以避免运行时故障。

根据设计评审报告的建议改进控制器设计。
运行时参数调优
调整MPC控制器的权重和约束,以在运行时优化其性能而不重新设计或重新实现它。在MATLAB中执行运行时控制器调整®和仿真软金宝app件。

在运行时调整权重和约束。
运行时性能监控
访问优化状态信号,以检测优化可能无法收敛的罕见情况。使用这些信息来指导备份控制策略的决策。

实时检测控制器故障。
明确的MPC
从隐式MPC设计生成显式MPC控制器,以更快地执行。简化生成的显式MPC控制器以减少内存占用。

从先前设计的隐式控制器生成显式MPC控制器。

最优和近似(次优)解决方案的执行时间比较。金宝搏官方网站
最优规划
使用非线性MPC控制器进行最优规划应用,这些应用需要具有非线性成本或约束的非线性模型。

基于非线性MPC的飞行机器人轨迹优化与控制。
反馈控制
在非线性成本和约束条件下模拟非线性装置的闭环控制。默认情况下,非线性MPC控制器使用最优化工具箱™来解决非线性规划问题。您还可以指定您自己的自定义非线性求解器。

放热化学反应器的非线性模型预测控制。
经济政策委员会
设计经济MPC控制器,以优化任意非线性约束下的任意成本函数的控制器。您可以使用线性或非线性预测模型,自定义非线性成本函数和自定义非线性约束。

环氧乙烷生产的MPC经济控制。
用MATLAB和Simulink生成代码金宝app
在Simulink中设计一个MPC控制器,并分别使用Si金宝appmulink Coder™或Simulink PLC Coder™生成C代码或IEC 61131-3 Structured Text。使用MATLAB Coder™在MATLAB中生成C代码并部署它进行实时控制。或者,使用MATLAB编译器™打包和共享MPC控制器作为一个独立的应用程序。

从MPC控制器块生成C代码。
内置求解器
从提供的主动集和内部点二次编程(QP)求解器中生成代码,以便在嵌入式处理器上有效实现。对于非线性问题,请使用优化工具箱中的顺序二次编程(SQP)求解器进行仿真和代码生成。将生成的代码部署到任意数量的处理器。

内置的解决者。
定制解决方案
使用embotech.force PRO QP和非线性规划(NLP)求解器来模拟和生成线性和非线性MPC控制器的代码。或者,使用自定义QP和NLP求解器进行模拟和代码生成。

自定义QP求解器模拟和代码生成。
与FORCES PRO集成
仿真和生成代码的MPC控制器与力PRO解决方案开发的博伊姆泰克公司
内部点QP求解器
有效计算大规模MPC问题的最优控制动作
非线性MPC代码生成
生成非线性MPC控制器的代码,使用默认的fmincon求解器与SQP算法
看发布说明有关这些功能的详细信息和相应的功能。
