为了简化自主水下航行器的控制,艾伯塔大学自主机器人项目的胡安·罗哈斯和Nathan Liebrecht加入了MaWorksChanelDouSuz。®浅谈MATLAB的使用®为其车辆设计、仿真并实现线性二次调节器(LQR)控制器。
胡安和内森首先从一个高层次的角度解释了LQR控制器背后的理论。LQR控制器是基于最优控制理论的
允许潜艇需要进行复杂的机动。这允许它们提供目标状态,控制器使用状态估计器将目标状态转换为发动机指令的工作百分比。他们还讨论了LQR相对于车辆PID控制器的优势。
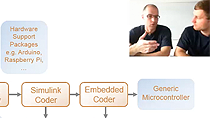
Juan和Nathan随后演示了他们设计该系统的工作流程。他们使用MATLAB和符号数学工具箱™ 以符号方式求解系统方程并将其线性化。这个
代码函数用于将这些符号表达式转换为C代码,然后将这些代码粘贴到在它们的工具上运行的Python脚本中。Juan还演示了使用MATLAB来模拟该控制器的行为
已启用ROS仿真平台。
额外资源: