本系列视频涵盖了鲁棒控制的高级介绍。我们的目标是让您快速了解一些术语,更好地理解什么是鲁棒控制,以及它如何适用于更大的控制领域。在第一个视频中,我们将讨论健壮性的含义以及它的重要性。所以,我希望你能坚持下去。我是Brian,欢迎来到MATLAB技术讲座。
让我们从一些定义开始,然后我们会回过头来,提供这些词背后的一些直觉。一个系统是鲁棒的,如果它能够满足需求(通常是稳定性或性能测量),即使存在模型或扰动的不确定性。基本上,它可以说,我不完全了解我的系统或它将在其中运行的环境,但我有信心它会工作!
而鲁棒控制理论就是我们如何获得这种信心的。它是一种方法或途径,我们可以用它来设计一个系统,以一种可以处理不确定性的方式。当然,还有比这更多的东西,比如我如何量化不确定性以及所有的不确定性是否都被平等对待,等等,我们将在这个系列中讨论其中的一些问题。但在开始之前,我想谈谈为什么我们需要首先考虑像健壮性这样的事情。
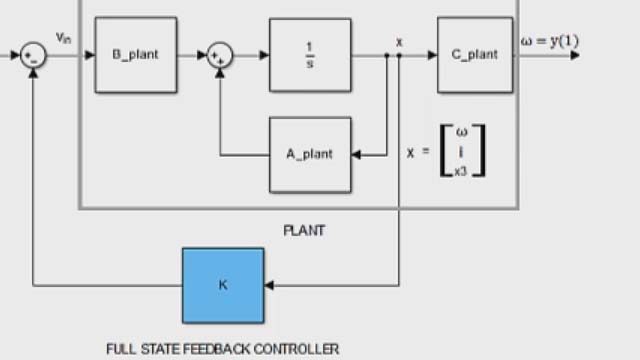
让我们看一下设计控制器的简化工作流。你有一个过程,你想要改变某个物理系统的行为。假设你想为无人机开发一个悬停控制器。您开发了该系统的数学模型,该模型将输入、电机速度映射到输出、无人机位置、速度和方向。你知道,基本上是一些功能,模仿真正的无人机的行为。然后使用该模型设计控制器,该控制器只是另一种映射,将参考信号和系统状态作为被控变量的输入和输出。这些是我们可以用来影响流程行为的东西。这个控制器映射可以有很多不同的形式,它可以是PID,或者全状态反馈,或者神经网络,或者一些非线性映射,或者任何你选择用来解决问题的形式。
你可能有一些性能或稳定性的要求,你正在设计,一旦你有一个控制器与模型工作,你可以实现它在一个嵌入式处理器驱动实际的无人机。如果你的模型与真实系统足够接近,那么你就会期望你设计的控制器也能在真实系统上工作。
但可悲的是,你的模型,你用来设计控制系统的模型,是错的。这意味着,您的控制系统在实际硬件上的工作与在模型上的工作不完全相同。现在的主要问题是,它足够好吗?我的意思是,我们的控制器可以处理实际系统中的一些差异,对吧?在解决这个问题之前,我们先来看看为什么这个模型是错的。原因有很多。
真实的系统是极其复杂的,输入到输出的映射可能很难理解——例如,我们可能不理解或无法测量某些东西,如高频动态,因此,我们的模型将不包括它们,或者至少它们在这些频率上不准确。
或者我们可能不太了解系统的输入,比如干扰,甚至是驱动系统的执行器的行为。所以,系统的驱动力是什么,以及系统如何响应这些驱动力,都存在不确定性。
此外,我们也可能有意地建立一个偏离真实物理的模型,以得到一些简单的东西。这是每个线性模型的情况,我们为了简单而牺牲了现实主义。另一件事是,系统本身可能会随着时间自然变化——而这种变化是由不可知的随机事件驱动的。短期的不可知事件,我们可以称之为噪音,而长期的事件可能是系统如何随着时间的推移而退化。这架无人机可能不会像一年后那样崭新。
最后,你可以设计一个单一的物理系统,但制造公差和缺陷意味着你不能确切地知道重复系统的参数。例如,你销售的玩具无人机的控制器,但每架无人机的制造方式都略有不同,因此飞行方式也略有不同。一个单一的系统模型不会捕捉到每一个无人机变化的唯一性,因此,当我们用它来表示所有无人机的集合时,会有一定的误差。
所有这些都使得模型无法完美地再现现实生活。它们只是近似值,但它们对解决许多问题非常有帮助,所以我们愿意忍受它们并不完美的事实。但由于它们的不完善,模型的输出与实际系统的输出之间存在一些不确定性,存在一些未知的差异。
因此,当您使用模型来设计控制器时,结果是它被定制为不完美的表示。因此,一个完美地调优到模型的控制器,在实际系统上仍然存在性能降低或稳定性降低的风险。
那么我们如何解决这个问题呢?一个简单的方法是在设计中添加空白。例如,不只是满足稳定性,而是超过它一定的数量,一些边际,这样我们就有信心,任何偏离我们认为的系统行为的偏差都不会导致系统超过需求。我们会吃掉一些边缘。
如果你熟悉经典增益和相位裕度,这就是它们的用途。您可能会要求在某些关键频率下增益裕度必须大于6 dB,相位裕度必须大于45度。这就是说,你必须设计你的控制器,以一种方式,即使增益比你的模型声称的高6分贝,或者如果相位滞后比你的模型声称的高45度,在它指定的频率下,真实系统仍然是稳定的。选择你需要的保证金取决于你的模型与真实系统匹配的不确定程度。
如果我们选择的边际太小,那么模型和实际系统之间的差异可能会导致比我们所准备的更大的偏差。如果我们选择了太多的边际,那么我们就太保守了,我们强迫自己建造一个必须满足更严格要求的系统,通常这会导致一个更昂贵的控制系统,要么是传感器的直接硬件成本,执行器的噪音更小或性能更好,要么是设计和测试一个性能更高的系统的工程时间成本更高。因此,诀窍在于选择完美的空白量,并将其应用到正确的地方。
增益和相位裕度只是评估系统稳健性的一种方法。它们肯定是有用的,但它们不一定能完整地反映系统的健壮性。以这个开环传递函数G(s)为例。我可以在MATLAB中用函数裕度求解经典的增益和相位裕度。在这里,你可以看到这个系统有无限的增益裕度,这意味着再多的增益也不会使闭环系统不稳定,它在0.4 rad/s的时候有将近70度的相位裕度。这相当于大约3秒的延迟余量。所以,这感觉是一个非常强大的系统,因为它有如此高的利润率。
为了说明这一点,让我们假设模型中的增益相差很大,而实际系统的开环增益要高15 dB。我们可以用反馈命令得到闭环系统并画出闭环系统的阶跃响应,你可以看到即使有这么大的增益误差,它仍然是一个稳定的系统。
我们也可以通过给开环系统增加一个延迟来增加相位。这里我选择了2秒的延迟。这消耗了总相位裕度的2/3,正如你所看到的阶梯响应闭环系统仍然是稳定的。所以增益增加15分贝,或者延迟增加2秒都是稳定的变化。
然而,如果我们同时增加增益和相位,情况就不一样了。在这里,我只增加了3 dB的增益和可怜的0.2秒的延迟,这导致闭环系统不稳定。所以它没有我们想象的那么健壮。因此,增益和相位不确定性的组合也需要考虑,而不仅仅是单独考虑。这就是为什么我们可以看圆盘边缘而不是经典边缘,因为它说明了同时增益和相位扰动。磁盘裕度的另一个优点是能够应用于多输入、多输出系统,经典的增益和相位裕度不能很好地处理这些系统。这里有很多需要解释的数字,我们将在下个视频中讨论更多关于磁盘边缘的内容,但有一件事需要快速注意,这表明磁盘增益和相位边缘分别只有1.3度和17度,这与我们的实验结果一致。这比经典增益和相位裕度所报道的要少得多。
现在,除了这两种方法之外,还有更多的方法来分析鲁棒性,但每一种方法的总体思想都是相同的:即计算出系统在不再满足目的之前可以处理多少不确定性和变化。
考虑到这一点,我们需要一种表示不确定性的方法。我的意思是如何描述模型中的错误,或者它与真实系统之间的差异。这一开始可能看起来有点奇怪,因为如果你知道模型与真实系统的不同之处,为什么要捕捉不确定性,为什么不更新模型呢?原因是我之前讲过的。通常,我们可以在不完全了解导致不确定性的动态情况下约束不确定性。例如,我们可能无法预测传感器噪声,但我们可以计算出噪声不会超过某个阈值或具有某种统计概率分布。对于经典的增益和相位裕度,我们将不确定性表示为纯增益误差或纯相位误差,当我们说我们需要6 dB和45度裕度时,这意味着我们已经评估了我们的系统和模型,并相信误差受这些值的限制。但是我们可以用其他方式来表示不确定性。例如,不确定性的数量可以基于频率。我们可以说,在低频率时我们对模型的信心要比在高频率时大得多。 So, we may require less margin in the design for low frequency behaviors, while requiring more margin for high frequency behaviors.
到目前为止,我们只介绍了鲁棒控制理论的分析部分,也就是找出我们的系统。鲁棒控制的另一半是综合:也就是说,创建一个专门考虑鲁棒性的系统,或者设计一个控制器,在系统中产生所需的裕度。现在,这里要注意的是,鲁棒控制不是特定类型的控制器,如PID或全状态反馈。相反,它是一种设计方法。这是一组工具,允许我们选择PID增益,或全状态反馈增益,或调整一些其他控制器,使其健壮。通过这种方式,我们可以设计,例如,一个单一的PID控制器,使用鲁棒方法,只要无人机的参数或动态变化在我们的不确定性范围内,它就会悬浮在我们所有的玩具无人机上。
在经典意义上,环整形是一种鲁棒控制方法。我们可以设置一个特定的增益或相位裕度,然后通过添加增益、极点和零来塑造环路,直到设计满足这些要求。然而,对于多输入多输出系统,或具有不能被简单增益或相位裕度限定的不确定性的系统,或高度非线性的系统,经典环路整形变得困难。因此,还有其他鲁棒控制方法来处理不同的情况。比如H无穷环成形,合成,等等,有很多方法。
所有这些的重点,所有的鲁棒控制理论都是为了解决不确定性。鲁棒控制的主要步骤是1)理解系统中的不确定性并将其表示在模型中,2)分析系统,看看它对这些不确定性有多鲁棒,3)如果系统不够鲁棒,那么就对系统进行更改,使其足够鲁棒。宽泛地说,这就是我们接下来三个视频要讲的内容所以我希望你们期待它。
如果你不想错过这些或其他未来的Tech Talk视频,不要忘记订阅这个频道。你想看看我的频道,控制系统讲座,我也会讲更多的控制理论话题。谢谢收看,我们下期见。