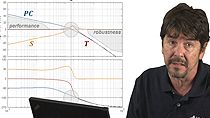
为了更好地理解在交叉频率点周围发生了什么,让我们首先简要地谈谈我们的闭环系统的稳定性。一般来说,对于任何反馈控制体系结构,所有相关闭环传递函数的分母上都有相同的特征多项式,系统的稳定性由该多项式的根决定。
在我们的情况下,该特征多项式是1 + PC。就频率响应而言,如果刚刚碰巧等于-1 - i表示在复杂平面上,则该表达式将是零。且仅在-1 - i的形式,真实-1或(-1,0)上。请记住,当我们通过JW替换错误时,传递函数P和C的乘积成为一个复杂的矢量,该矢量将具有幅度和一个阶段的W。
顺便说一句,这曲线称为奈奎斯特图,并注意到它是用我们用于伯编图的相同信息构造。主要区别在于,在两个单独的轴上显示凸型曲线曲线,而奈奎斯特曲线显示在真实与虚拟平面上的单个绘图中的数量。对于W的每个不同的值,该矢量的幅度和阶段将为我们提供图中的唯一点。如果我们扫描从0到无限远的所有值,我们将最终有一个完整的频率响应跟踪,用于传递函数。
在这种情况下,我们正在查看我们的开环传输功能PC的Nyquist图。请注意,如果PC的轨迹通过(-1,0)点,那么在该点处于该激励频率的情况下,我们的闭环传输函数的分母将变为0,这意味着T和S都会去对于无穷大,而且显然,我们的系统会爆炸,正如你可能猜到的那样,这将是非常糟糕的。因此(-1,0)是关键稳定边界,我们希望确保我们的开环设计,无论是什么,远离它。问题是,有多远?
顺便提一下,我们知道确定闭环系统的稳定性意味着找到1+PC的根是稳定的,也就是说它们都在复平面的左边。根据我们的控制器和设备的分子和分母的顺序,由此产生的特征多项式可以通过检查来解决有点麻烦。这就是为什么我们使用罗斯-赫维茨的方法,它通过观察系数来决定一个多项式的根是正的还是负的,或者奈奎斯特准则,它决定了闭环系统的稳定性,通过将开环传递函数上的零和极点的数量与频率跟踪的次数联系起来,奈奎斯特图,围绕(- 1,0)点。
不管怎样,我不想把事情弄得太复杂。假设我们有一个简单稳定的系统。就像我之前说的,真正的问题是,它有多稳定?为了回答这个问题,我们将观察开环轨迹上的两个临界点,一个是轨迹的大小为1,另一个是轨迹的相位角为-180度。
很明显,我们不希望这两个是一样的,因为这意味着我们在(-1,0)点上。因此,我们正在寻找的稳定裕度类似于定义一个安全区域,以确保我们离那个点足够远。
在简单的术语中,角度安全系数或相位余量表示,在变得不稳定之前我们可以拥有多少额外阶段滞后。和幅度安全系数或增益余量表示我们在变得不稳定之前可以获得多少额外增益。
如果我可以使用类比来帮助我解释这两个数字,请在滑块课程上思考下坡滑雪者。为了最大限度地提高他的速度,他将在他的脑海中制作一个理想或所需道路的计划,这些道路将在某种优化的时尚中通过这些盖茨。当他沿着课程开始时,他的实际路径可能会从所需的道路中滞后,但仍然能够使其能够一直到终点线。但是,如果他的实际转弯开始滞后太远了他的理想道路,那么就会有一个点,那滞后变得太大,他将无法恢复,并且可能最终会最终崩溃或缺少门。换句话说,他违反了他的阶段保证金。同样,通过增益保证金,将系统获得视为滑雪者轮流的艰难或尖锐。如果他的转向运动太尖锐,这意味着他正在使用太多的收益,他将最终过度矫正和过度地到所需路径的一侧,然后回到另一侧,失去课程并最终崩溃。
不管怎样,回到我们的波德图,(- 1,0)点值为1,这意味着在图上是0 db,相位是-180度。只要把180度滞后想象成控制器在应该拉动时推动,或者反过来,滑雪者在应该向左转弯时向右转弯。这样做不会有什么好处。
相位裕度是测量相位轨迹和-180度线之间的差在频率的幅度超过0db。为了稳定,我们需要相位裕度大于0,但通常我们希望保持在45度以上。对于一个相对平稳、阻尼良好的系统,通常推荐60度的相位裕度。
在相位越过-180度时,增益边际是幅度的倒数。对数刻度的倒数表示符号的变化。因此,为了稳定,增益裕度需要为正值。任何超过5db的地方通常是推荐的。
所以只是总结,稳定性边缘的关键值之一是他们不仅允许我们直接从我们的开环设计确定我们的闭环系统的整体稳定性,但他们也给我们一个有意义的我们.当然,稳定性稳定性边距,可以保证一定程度的性能,并可以保护我们免受我们系统动态中的不确定性和未确定的扰动。