视觉处理FPGA, Part 5: Hardware-Software Prototyping of a Lane Detection Design
从系列:视觉处理FPGA
Jack Erickson, MathWorks
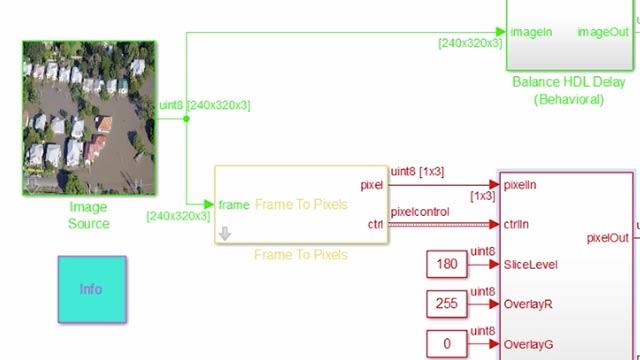
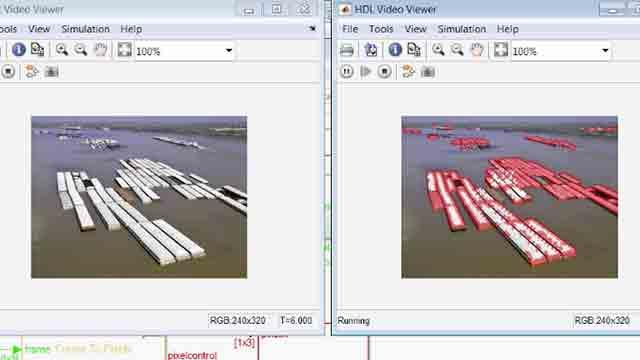
Vision processing algorithms are compute-intensive to simulate. Once a design has been verified as much as possible with simulation, prototyping on an FPGA development kit allows for real-time processing of live video input. This example adds a hardware-software interface to the lane detection example and uses the Computer Vision Toolbox™ Support Package for Xilinx®Zynq®-Based Hardware to efficiently build a working prototype.
Learn how to:
• Use HDMI video input to Simulink®
• Design hardware-software interface control functionality
• Generate HDL and software drivers with AXI4 interfaces
• Deploy software to a connected Xilinx Zynq device
• Run a prototype in external mode
Product Focus




Related Videos and Webinars















Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:.
Selectweb siteYou can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)