pidtune
线性对象模型的PID整定算法
语法
C = pidtune (sys、类型)
C = pidtune (sys, C0)
C = pidtune (sys、类型、wc)
C = pidtune (sys, C0, wc)
C = pidtune (sys,…,选择)
[C,信息]= pidtune(…)
描述
C= pidtune (sys,类型)类型的植物sys.如果类型指定一个单自由度(1-DOF) PID控制器,然后对单元反馈回路设计控制器,如图所示:

如果类型指定一个二自由度(2-DOF) PID控制器,则pidtune设计一个2-DOF控制器,如图所示:

pidtune调整PID控制器的参数C平衡性能(响应时间)和健壮性(稳定裕度)。
C= pidtune (sys,C0)C0.如果sys和C0离散时间模型,C有相同的离散积分公式吗C0.
C= pidtune (sys,类型,wc)C= pidtune (sys,C0,wc)wc为开环响应的第一个0db增益交叉频率。
C= pidtune (sys、……选择)pidtuneOptions指定选项集选择.
[返回数据结构C,信息] = pidtune(…)信息,其中包含有关闭环稳定性、所选开环增益交叉频率和实际相位裕度的信息。
输入参数
|
对于单输入,动态系统模型对工厂的控制器进行设计。
如果植物有不稳定的极点
你必须使用 |
|
控制器类型的控制器设计,指定为字符向量。这个词控制器类型指在控制器动作中出现的术语。例如,PI控制器只有比例项和积分项,而PIDF控制器则包含比例项、积分项和滤波导数项。 1-DOF控制器
二自由度控制器
有关一般二自由度PID控制器的更多信息,请参见二自由度PID控制器. 具有固定权重的二自由度控制器
关于固定设定值权重的2-DOF PID控制器的详细信息,请参见PID控制器类型. 控制器形式当你使用 如果 有关PID控制器形式和公式的更多信息,请参见: |
|
PID控制器设置所设计控制器的属性,指定为a |
|
为调谐开环响应的0db增益交叉频率的目标值。指定 增加 |
|
属性的附加调优选项 |
输出参数
|
控制器设计 控制器形式: 控制器类型:
然而,在这两种情况下,算法可以实现充分的性能和鲁棒性使用较低阶控制器比指定 时间域: 如果您指定 |
|
数据结构,包含关于调谐PID循环的性能和鲁棒性的信息。等领域的 如果 |
例子
命令行PID控制器设计
这个例子展示了如何为给定的对象设计PID控制器:
首先,建立电站模型并为其设计一个简单的PI控制器。
Sys = zpk([],[-1 -1 -1],1);[C_pi,信息]= pidtune (sys,“π”)
C_pi = 1 Kp + Ki *——s, Kp = 1.14, Ki = 0.454并联形式的连续时间PI控制器。
信息=结构体字段:稳定:1交叉频率:0.5205相位裕度:60.0000
C_pi是一个pid控制器对象,表示PI控制器。等领域的信息结果表明,调谐算法选择了约0.52 rad/s的开环交叉频率。
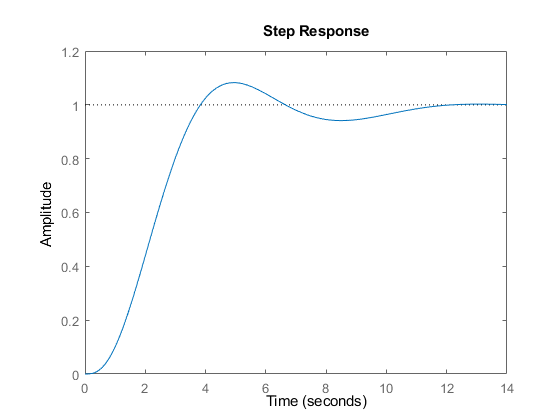
检查被控系统的闭环阶跃响应(参考跟踪)。
T_pi = feedback(C_pi*sys, 1);步骤(T_pi)
为了提高响应时间,您可以设置比结果更高的目标交叉频率pidtune自动选择,0.52。将交叉频率增加到1.0。
[C_pi_fast,信息]= pidtune (sys,“π”, 1.0)
C_pi_fast = 1 Kp + Ki *——s, Kp = 2.83, Ki = 0.0495并行形式的连续时间PI控制器。
信息=结构体字段:稳定:1交叉频率:1相位裕度:43.9973
新的控制器实现了更高的交叉频率,但以减少相位裕度为代价。
比较两种控制器的闭环阶跃响应。
T_pi_fast =反馈(C_pi_fast * sys, 1);step(T_pi,T_pi_fast)轴([0 30 0 1.4])图例(“π”,“π,快”)

性能下降的原因是PI控制器没有足够的自由度来在1.0 rad/s的交叉频率下实现良好的相位裕度。添加一个衍生动作可以改善响应。
设计了一种pid控制器Gc目标交叉频率为1.0 rad/s。
[C_pidf_fast,信息]= pidtune (sys,“PIDF”, 1.0)
C_pidf_fast = 1 s Kp + Ki *——+ Kd * -------- s Tf*s+1, Kp = 2.72, Ki = 0.985, Kd = 1.72, Tf = 0.00875并行形式的连续时间PIDF控制器。
信息=结构体字段:稳定:1交叉频率:1相位裕度:60.0000
信息领域表明,在控制器中的微分作用允许调谐算法设计一个更积极的控制器,以实现目标交叉频率与良好的相位裕度。
比较了快速PI和PIDF控制器的闭环阶跃响应和抗扰性。
T_pidf_fast =反馈(C_pidf_fast * sys, 1);步骤(T_pi_fast T_pidf_fast);轴([0 30 0 1.4]);传奇(“π,快”,“PIDF,快”);

你可以用快速PI和PIDF控制器比较被控系统的输入(负载)抗扰性。为此,绘制从设备输入到设备输出的闭环传递函数的响应。
S_pi_fast =反馈(sys, C_pi_fast);S_pidf_fast =反馈(sys, C_pidf_fast);步骤(S_pi_fast S_pidf_fast);轴([0 50 0 0.4]);传奇(“π,快”,“PIDF,快”);

这幅图表明,PIDF控制器也提供了更快的干扰抑制。
设计标准形式的PID控制器
为下列装置设计标准形式的PID控制器。
要设计标准形式的控制器,使用标准形式的控制器作为C0参数pidtune.
Sys = zpk([],[-1 -1 -1],1);C0 = pidstd (1 1 1);C = pidtune (sys, C0)
C = 1 1 Kp *(1 + ---- *——+ Td * s) Ti s具有Kp = 2.18, Ti = 2.57, Td = 0.642的标准形式的连续时间PID控制器
指定积分离散化方法
设计一个离散时间PI控制器,用指定的方法对积分器进行离散。
如果你的工厂是离散时间的,pidtune使用默认的正向欧拉积分方法自动返回一个离散时间控制器。要指定不同的积分方法,请使用pid或pidstd创建一个具有所要求的积分方法的离散时间控制器。
Sys = c2d(tf([1 1],[1 5 6]),0.1);C0 = pid (1, 1,“t”, 0.1,“IFormula”,“BackwardEuler”);C = pidtune (sys, C0)
C = Ts*z Kp + Ki * ------ z-1, Kp = -0.0658, Ki = 1.32, Ts = 0.1采样时间:0.1秒并行形式离散时间PI控制器。
使用C0作为输入原因pidtune设计控制器C的形式、类型和离散化方法相同C0.这个显示表明,的积分项C采用后向欧拉积分法。
指定一个梯形积分器并比较得到的控制器。
C0_tr = pid (1, 1,“t”, 0.1,“IFormula”,“梯形”);Ctr = pidtune (sys C0_tr)
Ctr = Ts*(z+1) Ki * -------- 2*(z-1) with Ki = 1.32, Ts = 0.1
设计二自由度PID控制器
为给定传递函数的被控对象设计一个二自由度PID控制器:
使用1.5 rad/s的目标带宽。
wc = 1.5;G = tf(1,[1 0.5 0.1]);C2 = pidtune (G,“PID2”wc)
C2 = 1 u = Kp (b*r-y) + Ki——(r-y) + Kd*s (c*r-y) s,具有Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0并联形式的连续二自由度PID控制器。
使用类型“PID2”原因pidtune生成一个二自由度控制器,表示为apid2对象。显示器证实了这个结果。显示屏上也显示了这一点pidtune调优所有控制器系数,包括设定值权重b和c,以平衡性能和健壮性。
提示
算法
有关MathWorks的信息®PID整定算法,见PID优化算法.
选择
有关实时编辑器中的交互式PID调优,请参阅调整PID控制器住编辑任务。这个任务让您交互式设计一个PID控制器,并自动生成MATLAB代码为您的生活脚本。例如,请参见实时编辑器中的PID控制器设计
对于独立应用程序中的交互式PID调优,请使用PID调谐器.看到用于快速参考跟踪的PID控制器设计以使用应用程序设计控制器为例。
参考文献
Åström, k.j.和Hägglund, T。先进的PID控制,研究三角园区,数控:仪器仪表、系统和自动化学会,2006。
另请参阅
功能
应用程序
住编辑任务
对象
你也可以从以下列表中选择一个网站:
