间接磁场定向矢量控制之前,我们讨论了一些重要概念如克拉克和公园变换和空间矢量调制。理解这些基本概念很重要当设计一个FOC算法。然而,这并不是足够因为运动控制是一个复杂的过程,还有更多在设计和实现时,你需要考虑FOC算法。电机控制工程师执行各种任务,从植物建模控制算法设计和开发生产微处理器和FPGA实现。在这个视频中,我们不能够涵盖一切但关注的话题。我们会给你10实现船的实际问题。在这个视频中,我将与你分享一些资源在这些话题,包括视频和参考示例使用该电机从德州仪器设备。注意,引用的例子可以用来模拟和代码生成。你可以验证控制算法在桌面模拟之前你从算法生成代码并将其部署到硬件。请查收视频的共享资源的链接描述。
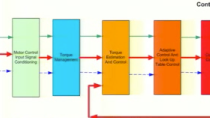
我们先谈谈FOC架构,我们介绍了在前面的视频。我们有两个反馈回路控制的智商和Id电流所需要的值。这部分算法代表了当前或转矩控制和最内层循环的形式完成运动控制算法。其他常见的控制速度和位置控制模式。速度控制在电流控制回路是一个级联循环。在速度控制,我们希望汽车遵循速度参考使用这个控制器。控制器的输出生成的输入的当前循环,智商和Id电流的参考价值。位置控制是另一种级联回路循环速度控制回路。在位置控制,控制器跟踪位置参考和生成的输入速度控制回路。
为了实现高效的电机控制,控制算法需要运行在高采样率。在这样一个级联控制结构,内部控制回路需要回应速度远远超过外部控制回路。这个例子使用船控制永磁同步电动机马达的速度。不同的颜色表示不同的样品时间循环的算法。我们看到最里面的电流环运行20 khz。作为一个经验法则,外循环这种情况下loop-needs运行速度比内部循环慢至少10倍。所以,循环运行速度在2千赫。如果我们有一个位置控制回路,然后运行在200赫兹,低于10倍的速度控制回路。
这里要注意的一个重要的事情是,FOC算法需要转子位置的知识。这些值可以用传感器测量或估计使用observer-based技术。让我们先关注传感器的方法。在某些情况下,您使用一个传感器,可以测量电机转子的位置。在永磁同步电动机常用的传感器包括正交编码器和霍尔传感器。了解这些传感器用于测量转子位置在FOC,您可能想要查看这些引用的例子。这允许您使用一个正交编码器实现船。在当前控制子系统,传感器驱动程序块让你读了正交编码器脉冲,然后转换成角转子位置和速度,这些块,分别。你可以从这个模型生成代码和部署到硬件电动机旋转。这里,我们改变速度参考不同的值,看看电机跟踪命令速度。
接下来,我们将讨论传感器校准。传感器使用的船,您将需要执行传感器校准,从而消除传感器偏移和准确计算电流和位置反馈值。这里有几个例子,介绍传感器校准过程。每个例子都有一个目标和一个主机模型。一旦我们从目标模型和生成代码下载到处理器,我们使用宿主模型运行在我们的计算机与目标。
让我们简要讨论一下电流传感器校准。使用模拟到数字转换器阶段电流测量,或adc。为了找到ADC偏移量,我们需要阅读ADC计数当没有阶段电流电动机。这就是为什么电机断开逆变器。一旦我们按照提供的步骤在这个例子中,目标模型会持续阅读的ADC和寄给主机模型。ADC读数的平均值将给我们ADC补偿。
我们遵循类似的工作流的校准补偿霍尔传感器和正交编码器。在这些例子中,目标模型是一个独特的算法,使用开环控制电机以恒定的速度运行。模型让我们阅读位置传感器的转子位置测量,比较了开环转子位置测量值,这是在开环控制算法生成的参考。开环之间的不同转子位置和测量转子的位置给我们位置传感器偏移量。
我们讨论了基于传感器测量转子位置的方法。接下来,我们将讨论无传感器矢量控制。在某些情况下,您可能希望执行电机无传感器控制,这可能是由于成本与传感器的使用。传感器控制的替代方法是使用无传感器的方法来估算转子位置反馈。这个示例允许您使用observer-based技术如滑模观测器或通量观察者实现无传感器矢量控制。你可以选择这些观察者的位置估计。下的转子位置估算进行电流控制子系统。当我们浏览看到这里,我们可以把这船使用的观察者块算法。两块采取同样的输入测量电压和电流。回想一下,这些电压和电流计算由这些变换的电流控制部分FOC算法。 Similarly, if we now navigate to current control in this example, we see that the inputs to the observer blocks are the voltages computed by the Inverse Park Transform and the currents computed by the Clarke Transform. The observers then output the estimated rotor position of the motor and other estimated values such as the rotor flux and torque.
讨论基于传感器和无传感器方法后,我们将讨论电机和逆变器建模在发展中FOC算法是至关重要的。控制设计是一个迭代的过程,需要大量的测试与系统闭环。通常,我们想要控制的电动机是开车或更大而复杂的系统,它的一部分可能是昂贵的操作。但更重要的是,没有一个稳定控制器我们可能破坏整个系统,这也可能导致安全问题。因为所有这些原因,控制工程师通常开发一个代表性模型的实际物理系统,在这种情况下,电机和逆变器,然后设计和测试使用模拟控制器与模型之前部署真实系统的控制器。
创建一个工厂我们的电机模型,我们需要知道这里列出的运动参数(如相电阻(Rs),d和问轴电感(Ld和江西)、反电势恒定(柯),电机惯性(J),摩擦常数(F))。通常,我们会发现这个电机数据表中的信息。但是在某些情况下,数据表不可用。或即使电机参数,有时模拟执行创建的模型根据给定的参数不匹配的真实世界的运动行为。
这是参数估计的解决之道。这个例子让你估计参数的永磁同步电动机运行这个特殊的TI单片机和变频器列在这里。模型在电动机运行一组仪器测试收集输入和输出数据,然后基于测量数据,估计电机定子电阻等参数d和q轴电感,反电动势不变,运动惯性,摩擦不断。参数估计后,您可以将它们保存在一个文件或创建一个新的模型,该模型将包括一块永磁同步电动机参数化估计运动参数的值。学习如何运行这个模型并进行运动参数估计,查看视频链接的描述。
你现在可以把这个汽车模型平均价值逆变器电机动力学的精确闭环模拟。根据您的需求,您还可以创建逆变器和电动机模型在不同级别的忠诚。这是另一个例子,它使用这个转换器可以让我们选择逆变器的开关装置。例如,我们可以使用理想的开关或开关igbt或场效应管等。当我们与这些低收入和高保真模型模拟,这就是我们将会得到的速度,当前阶段,电压,和空间矢量调制波形。用黄色的信号反映逆变器的开关的影响与高保真模型,而反应以蓝色显示逆变器仿真结果的平均价值。我们这里讨论的示例使用equation-based电动机模型或集总参数模型,但是您可以创建模拟模型饱和度和空间谐波。
一旦你完成电机和逆变器建模,在下一步你需要调整当前的收益和速度控制回路。选择之一是执行基于规则的优化使用功能可用来计算电流和速度的控制器增益循环一旦你估计运动参数。一旦收益计算、系统设计与波德可以分析,根轨迹和阶跃响应图。
另外,您可以利用自动调谐技术来自动调整控制器的收益FOC算法。这个例子与Speedgoat电机控制设备运行,其中包括实时目标机器的变频器和永磁同步电动机。它使用FOC自动调谐块计算收益的智商,Id和速度控制回路实现这个子系统。我们很快就会看到,自动调谐实时执行部署模型运行时实际目标驱动电动机。一旦你建立模型和负载应用程序Speedgoat目标,模型第一次使用初始增益值来控制电机速度不同。FOC自动调谐从这里开始,对在一系列的实验中,注入扰动信号的马达。由此产生的运动反应与调整收益向我们展示了如何跟踪相比提高了响应的初始收益。在FOC自动调谐的更多信息,请查看这些视频。
使用闭环控制算法模拟测试后,最后一步是生成代码从你船算法并将其部署到嵌入式单片机为旋转马达。我们显示到目前为止的示例使用TI处理器,但你可以针对任何处理器与ANSI C代码。对于代码生成,您可以您的模型分割成算法和特定于硬件的部分。这意味着您可以生成代码分开你的船算法然后传感器和PWM驱动外围设备。司机块实现电流和位置传感器以及PWM写道,而船算法实现速度和电流回路。这是我们之前看到的例子,实现船使用正交编码器TI汽车装备。使用这个示例中,您可以运行闭环模拟和当你准备继续生产,您可以生成代码并将其部署到TI处理器。查看所需步骤的这个过程中,别忘了看看这个视频。一旦部署代码,您可以使用主机模型也改变电动机的参考速度和参考速度和测量速度是怎样变化的。一件事情要考虑的是,在你部署和运行算法实际电机旋转,您还可以执行processor-in-the-loop或公益诉讼,测试测试嵌入式单片机控制器的性能。 In PIL testing, the controller is deployed and executes on the processor, whereas the motor and inverter model run on the host computer. Let’s use this model to perform PIL simulation with the current control algorithm. You first deploy the current control subsystem to the processor. Once you build code for this subsystem, it creates a new one called PIL. You can now replace the current control subsystem with the PIL block. After deployment, the current control algorithm executes on the processor, but the controller will not be driving the actual motor. Instead, we’ll be performing closed-loop simulations with the motor and inverter model. You can also keep the current control subsystem to compare the algorithm execution on the host machine and in the PIL simulation. You can generate a profiling report that includes the execution times of your control algorithm. The model we used to generate this report has the current loop sample time set to 50 microseconds. And the profiling report shows that the current loop runs in 5 microseconds on the embedded microcontroller, which is efficient for the 50 microsecond sample time that we had specified for this model.
今天,我们讨论了这10个实现定向控制的实际问题。我们还分享了一些例子和视频可以帮助你开始使用算法设计和实现自己的船。这些例子,我们今天讨论的大部分功能,可在运动控制Blockset。所以,你可能想看看这个页面关于电机控制Blockset的更多信息。找到的所有资源的链接我们覆盖在这个视频中,请不要忘记查看视频描述。