 克莱夫之角:克莱夫·莫勒谈数学与计算
克莱夫之角:克莱夫·莫勒谈数学与计算 罗兰对MATLAB的艺术
罗兰对MATLAB的艺术 史蒂夫的图像处理与MATLAB
史蒂夫的图像处理与MATLAB Simulin金宝appk上的家伙
Simulin金宝appk上的家伙 深度学习
深度学习 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条背后
头条背后 文件交换选择的一周
文件交换选择的一周 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 创业公司、加速器和企业家
创业公司、加速器和企业家 MATLAB社区
MATLAB社区 Matlab
Matlab矩阵是计算机图形学的核心
如下屏幕截图所示的矩阵是计算机图形学的核心。它们描述在三维空间中运动的物体。MATLAB的Handle Graphics使用它们。MathWork的新产品也是如此走鹃编辑器。所有流行的视频游戏和CAD软件包也是如此。
内容
犹他州的茶壶
从1976年由当时犹他大学的研究生Martin Newell推出以来,Teapot在计算机图形学的发展中发挥了重要作用。如果你知道如何寻找它,你可以在皮克斯的电影和福克斯电视台的《辛普森一家》中看到它。有一个优秀的维基百科页面还有一个有趣的展览计算机历史博物馆。茶壶的坐标可以在MATLAB中通过函数得到teapotGeometry。描述茶壶的阴影和照明的MATLAB实时脚本是可以在这里。
Teapot = grafix;

米
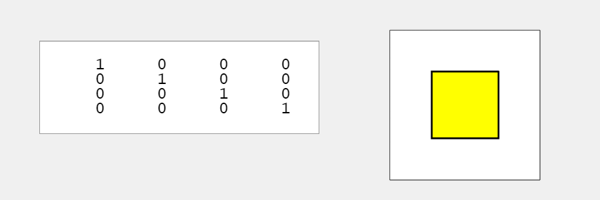
我感兴趣的米面板中的矩阵。它现在是4 × 4单位矩阵。这个矩阵描述了在目标对象集合上进行的所有转换。
旋转
齐次坐标使得用4 × 4矩阵描述旋转、平移和许多其他变换成为可能。矩阵用前三个分量中的对象的坐标对向量进行操作,现在是第四个分量中的1。
这个矩阵留下z旋转时坐标固定x和y。
R_z(t) = [cosd(t) -sind(t) 0 0 sind(t)) cosd(t) 0 0 0 0 1 0 0 0 0 1]
这是一个45度的旋转z。
Rz = R_z(45)
Rz = 0.7071 -0.7071 00 0.7071 0.7071 0000 1.0000 0000 1.0000
在茶壶上旋转。
应用(茶壶,Rz)

Rz * Rx
一个变换序列由所有矩阵的乘积表示。
这个正交旋转叶片x旋转时固定y和z。
R_x(t) = [1 0 0 0 0 cosd(t) -sind(t) 0 0 sind(t) 0 0 0 0 1]
保持原来的45度z通过旋转60度变换x。
Rx = R_x(60) M = Rx*Rz;应用(茶壶,米)
Rx = 1.0000 0000 0.5000 -0.8660 00 0.8660 0.5000 0000 1.0000

顺序很重要,因为这些矩阵不能交换。这是颠倒顺序的结果。
M = Rz*Rx;应用(茶壶,米)

变化中
这使得y旋转时固定x和z。
R_y(t) = [cosd(t) 0 -sind(t) 0 0 0 1 0 0 sind(t) 0 cosd(t) 0 0 0 0 1]
Ry = R_y(-120) apply(Teapot,Ry)
Ry = -0.5000 0 -0.8660 00 1.0000 00 0.8660 0 -0.5000 000 1.0000

平移和缩放
非正交矩阵来源于平移和缩放。齐次坐标和M的第四列产生平移。一个典型的翻译是
T_x(t) = [1 0 0 0 0 0 0 0 0 0 0 0 0 1];
Tx = T_x(2.5)
Tx = 1.0000 00 2.5000 0 1.0000 000 1.0000 000 1.0000 000 1.0000
把茶壶沿着x轴。
应用(茶壶,Tx)

我们可以分别缩放每个坐标方向。或者,这个矩阵对所有的坐标应用一个因子。
S_xyz(t) = [t 0 0 0 0 0 t 0 0 0 0 t 0 0 0 1];
Sxyz = S_xyz(0.75)
Sxyz = 0.7500 0000 00 7500 0000 7500 0000 1.0000
“亲爱的,我把茶壶缩小了。”
应用(茶壶,Sxyz)

在一起
我产生了五个变换,处方,Rz,变化中,Tx和Sxyz。这是他们的产品,按介绍的先后顺序排列。
M = Sxyz*Tx*Ry*Rz*Rx;应用(茶壶,米)

这是相反的顺序。
M = Rx*Rz*Ry*Tx*Sxyz;应用(茶壶,米)

最后,一个混乱的订单。
M = Rz*Ry*Sxyz*Tx*Rx;应用(茶壶,米)



另请参阅
-

研究计算机图形学的数学
博客
-
计算机图形矩阵和立方体
博客
-

探索最短路径——第1部分
博客





댓글
■■■■■■■■링크大黄蜂:大黄蜂:大黄蜂:大黄蜂:大黄蜂