 克利夫角:克利夫摩尔的数学和计算
克利夫角:克利夫摩尔的数学和计算 Loren在Matlab的艺术上
Loren在Matlab的艺术上 史蒂夫在图像处理与matlab
史蒂夫在图像处理与matlab 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 Stuart的Matlab视频
Stuart的Matlab视频 在头条新闻后面
在头条新闻后面 本周的文件交换选择
本周的文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 创业公司、加速器和创业者
创业公司、加速器和创业者 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー机械系统建模:双摆
你有没有模拟机械系统?机械系统由像簧等体,关节和力元件组成。在这篇文章中,我将向您展示如何使用基本模拟和使用的双重摆金宝app兴业机械.
更新 - 9/14/2015:此博客帖子使用SimMechanics第一代。可以找到使用SimMechanics第二代实现双摆的示例在这里。
摆:运动方程
我使用的大多数模型都是数据流和算法的表示。如果你想要一个机械系统的模型,你需要运动方程,这样你就可以从基础Simulink块构建系统。金宝app当然,如果你不知道摆的方程,你必须推导出来。
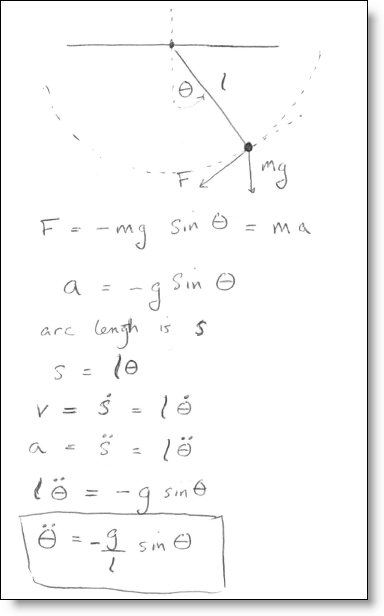
如果你从这个等式开始,并遵循之前文章中描述的过程如何绘制杂散,钟摆模型是这样的:
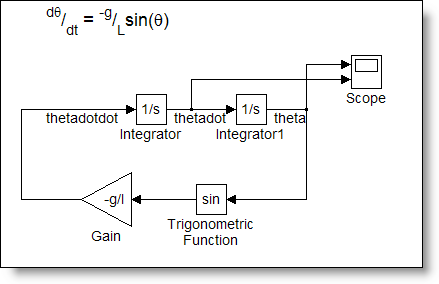
该模型是数学运算和算法元素的图形表示。金宝appSimulink通过根据排序顺序评估各个块来解决差分方程来计算各个块来计算状态的衍生率。求解器使用数字集成来通过时间计算状态的演变。
绘制机械系统
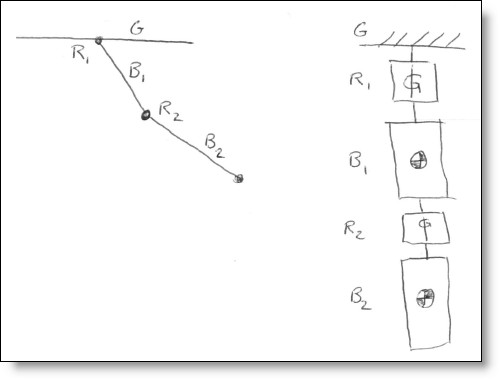
SimMechanics提供了一种替代方法来推导方程并使用基本块实现它们。我们不是用系统的数学模型来表示,而是用一种表示方法来描述机械系统的关键部件。SimMechanics中的基本单位是物理元素而不是算法元素。为了构建SimMechanics模型,你必须将机械系统分解成描述它的构建块。当你考虑摆的时候,它是一个连接到一个关节的物体,这个关节连接到某种基底,我们称之为地面。
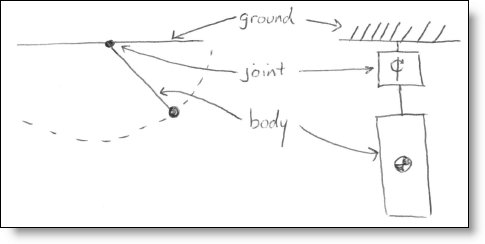
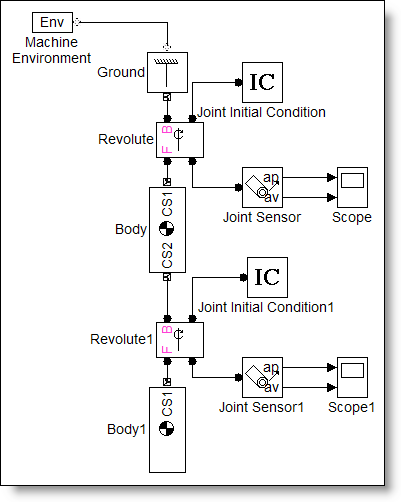
SimMechanics库中的基本元素具有精确描述它们的特殊名称。在我开始使用SimMechenics之前,我不知道这一点,但我的摆锤示例中的关节称为旋转。要构建该系统,我们抓住了相应的块并将它们连接在一起(有点像乐高)。SimMechanics块上的端口是连接器端口,它们之间运行的“信号”是连接线。这些线路不代表数据流,它们代表元素之间的机械连接。
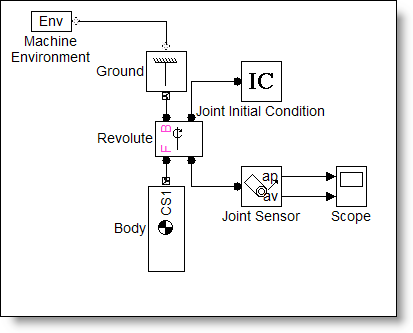
这些特殊的连接线和连接端口无法直接连接到Simulink信号和端口。金宝app传感器允许您挖掘机械组件并测量其物理性质。在上面的摆锤模型中,我已经测量了旋转关节的角位置(AP)和角速度(AV)。
当你模拟SimMechanics模型时,这个过程与常规的Simulink数据流有点不同。金宝app在初始化时,SimMechanics分析机械系统以确定机器的拓扑和几何结构。在运行时,外力和力矩应用于机器,集成,机器状态更新。因为模型可能包含约束,求解器检查机器的所有元素在可接受的公差范围内的一致性。组成机器的“块”不像常规的Simulink块那样在模拟循环中一次运行一个。金宝app
双摆形:运动方程
让我们比较一下在基础Simulink块和使用SimMechanics之间的双摆建模过程。金宝app我不知道双摆的运动方程,所以我们可以推导出来。
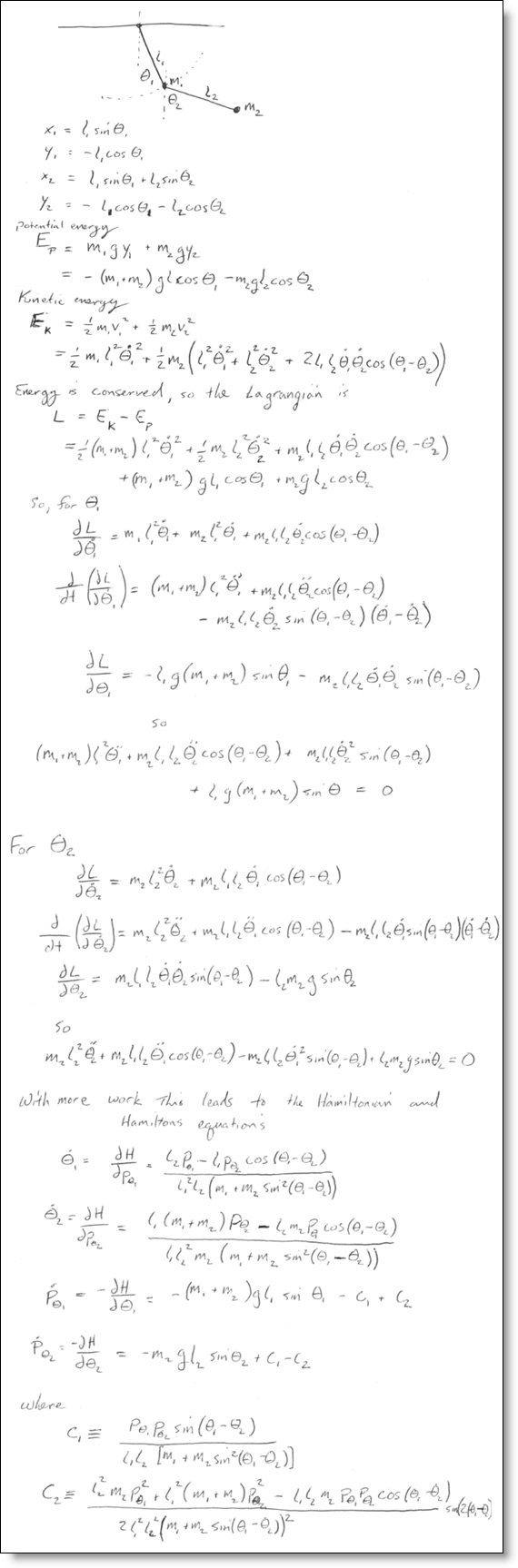
除了我手中的痉挛,试图让我的写作清晰,基础块的实施有点困难。状态变量之间存在物理连接,如果以上写入,则获得代数循环。
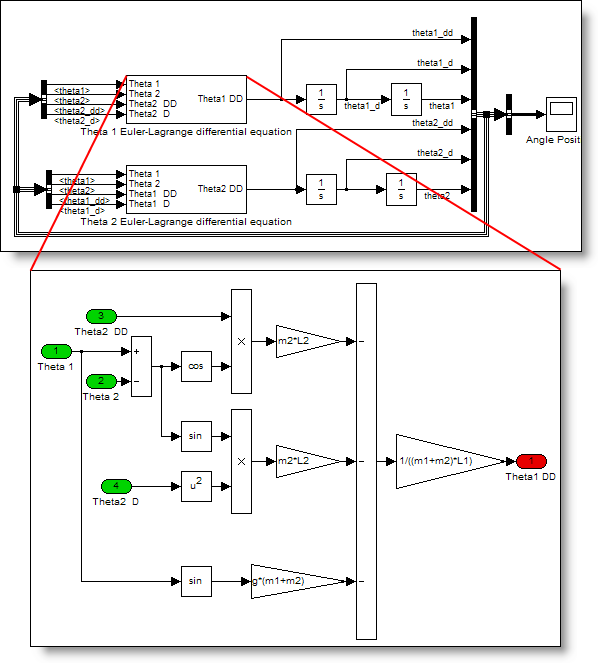
绘制双摆锤
使用SimMechanics制作双摆型,我只是重复第一个接头和主体,以使第二臂连接在第一臂。
在几秒钟内,我将钟摆模型转换为双摆模型。
现在轮到你了
你如何建模一个三关节的钟摆?N-joints怎么样?留下一个这里的评论请告诉我们您是否会派生方程式,或者为SIMMEchanics达到。


也可以看看
-

接触建模介绍
博客
-




评论
要发表评论,请点击在这里要登录您的MathWorks帐户或创建新的。