TuningGoal。过度class
包:TuningGoal
控制系统调优的超调量约束
描述
使用TuningGoal。过度限制从控制系统的指定输入到指定输出的阶跃响应的超调。使用诸如调优命令的调优目标来控制系统调优systune或looptune.
建设
要求的事情= TuningGoal。超过(inputname,outputname,maxpercent)maxpercent以百分比的形式指定最大超调量。
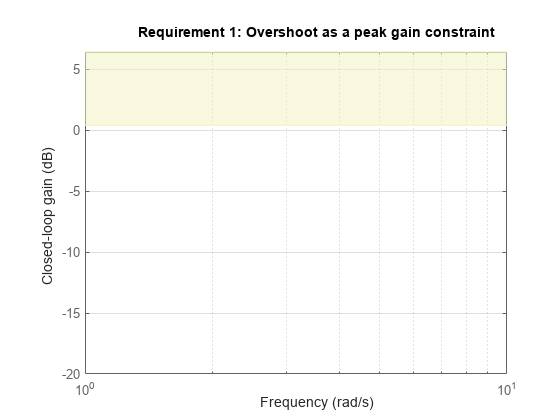
当你使用TuningGoal。过度对于调优,该软件将超调量约束映射为假设二阶系统特征的峰值增益约束。因此,该映射仅对高阶系统是近似的。此外,此调优目标不能可靠地将超调量降低到5%以下。
输入参数
|
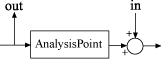
用于调优目标的输入信号,指定为字符向量,或者对于多输入调优目标,指定为字符向量的单元格数组。
有关控制系统模型中分析点的更多信息,请参见控制系统分析与设计的感兴趣信号标记. |
|
调优目标的输出信号,指定为字符向量,对于多输出调优目标,指定为字符向量的单元格数组。
有关控制系统模型中分析点的更多信息,请参见控制系统分析与设计的感兴趣信号标记. |
|
最大超调百分比,指定为标量值。例如,下面的代码在步长响应中指定最大5%的超调 Req = TuningGoal。超过(“r”,“y”5);
|
属性
|
最大超调百分比,指定为标量值。例如,标量值5表示超调不应超过5%。的初始值 |
|
参考信号缩放,指定为正实数向量。 对于MIMO跟踪需求,当单位的选择导致响应的不同通道中大小信号的混合时,使用此属性指定向量值步进输入中每个输入项的相对振幅。该信息用于将传递函数中的非对角线项从参考缩放到跟踪误差。这种缩放确保交叉耦合相对于每个参考信号的幅度进行测量。 例如,假设 要求的事情。InputScaling = [100,1]; 这告诉软件考虑第一个参考信号比第二个参考信号大100倍。 默认值: 默认值: |
|
输入信号名称,指定为字符向量的单元格数组,用于标识调优目标约束的传递函数的输入。的初始值 |
|
输出信号名称,指定为字符向量的单元格数组,用于标识调优目标约束的传递函数的输出。的初始值 |
|
调优目标应用于的模型,指定为索引向量。 使用 要求的事情。模型= 2:4; 当 默认值: |
|
评估调优目标时要打开的反馈循环,指定为标识循环打开位置的字符向量的单元格数组。调优目标是根据在您确定的位置打开反馈循环所创建的开环配置进行评估的。 如果您正在使用调优目标来调优控制系统的Simulink模型,则金宝app 如果使用调优目标来调优广义状态空间( 例如,如果 默认值: |
|
调优目标的名称,指定为字符向量。 例如,如果 要求的事情。的名字= 'LoopReq'; 默认值: |
例子
提示
该调优目标对闭环传递函数施加了隐式稳定性约束
输入来输出,以在中确定的点上打开的循环进行计算开口.受此隐式约束影响的动力学为稳定的动力学对于这个调优目标。的MinDecay而且MaxRadius选项的systuneOptions控制这些隐式约束动态的边界。如果优化不能满足默认边界,或者默认边界与其他需求冲突,请使用systuneOptions更改这些默认值。
算法
控件调优控制系统时TuningGoal,软件将调优目标转换为规范化的标量值f(x).x是控制系统中自由(可调)参数的矢量。然后,软件调整参数值以最小化f(x),或开车f(x)低于1(如果调优目标是硬约束)。
为TuningGoal。过度,f(x)反映了对目标的相对满足或违背。的偏差百分比f(x) = 1大致对应于偏离指定超调目标的百分比。例如,f(x) = 1.2表示实际超出目标约20%,并且f(x) = 0.8表示实际超调值比目标值少20%左右。
TuningGoal。过度使用
作为超调的代理,基于二阶模型的特性。在这里,T是调优目标约束的闭环传递函数。超调范围从5% (
= 1)至100% (
).TuningGoal。过度在迫使超调低于5%方面是无效的。
版本历史
在R2016a中引入另请参阅
looptune|systune|systune(用于slTuner)(金宝appSimulink控制设计)|looptune(用于slTuner)(金宝appSimulink控制设计)|viewGoal|evalGoal|TuningGoal。获得|TuningGoal。灵敏度|slTuner(金宝appSimulink控制设计)
主题
您也可以从以下列表中选择一个网站: