阴谋
绘制这里的HD Live Map层数据
描述
图(plot HERE HD Live Map[1](这里HDLM)地理轴上的层数据。dirlaydata.)dirlaydata.是否从选定的贴图中读取的地图层对象hereHDLMReader对象的读功能。
图(在指定的地理轴上绘制层数据,dirlaydata.“轴”,gxIn)gxIn。
例子
绘图路线拓扑数据
载入一个驾驶路线的经纬度坐标序列。
data = load(“geoSequence.mat”)
data =结构体字段:纬度:[1000×1双]经度:[1000×1双]
从指定的坐标创建一个HERE HD Live Map (HERE HDLM)阅读器。如果您以前没有设置HERE HDLM凭据,则会出现一个对话框提示您输入凭据。读取器包含驾驶路线所在贴图的分层地图数据。
读者= hereHDLMReader (data.latitude data.longitude);
中读取道路拓扑数据TopologyGeometry层。绘制数据。
Roadtopology =读取(读者,'topologicegeometry');情节(roadTopology)传说(“位置”那“东北朝”)

在地图上标出行驶路线坐标。
抓住在geoplot(data.latitude,data.longitude,“bo - - - - - -”那'显示名称'那“路线”)举行从
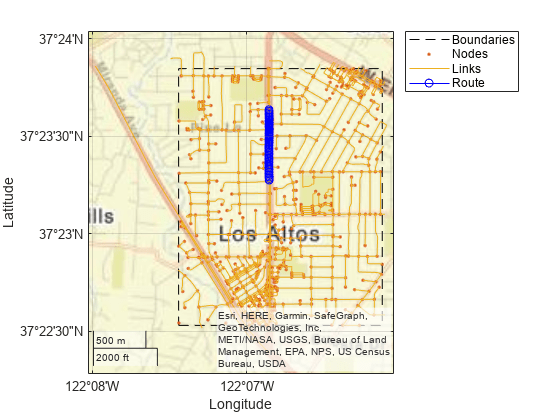
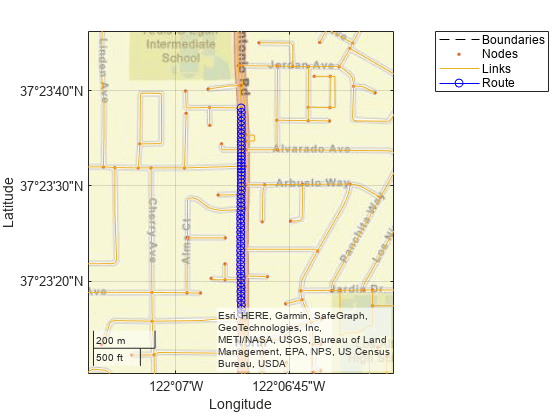
放大路线。
拉茨中心=中位数(data.lititude);Loncenter =中位数(Data.Longitude);offset = 0.005;Latlim = [LatCenter-Offset,LatCenter + Offset];lonlim = [loncenter-offset,loncenter + offset];地理(Latlim,Lonlim)
从驾驶路线绘制和流巷道拓扑数据
使用HERE HD Live Map (HERE HDLM)服务读取行车路线及其周边区域的车道拓扑数据。绘制这些数据,然后在地理播放器上播放路线。
加载美国马萨诸塞州纳尼克的驾驶路线的纬度和经度坐标。
路线=负载('GeosequenceNatickma.mat');Lat = Route.rititude;lon = route.longitude;
在地理播放器上播放坐标。
球员= geoplayer(纬度(1),经度(1),'历史中心'5);plotRoute(纬度,经度)为了IDX = 1:长度(LAT)绘图(播放器,LAT(IDX),LON(IDX))结尾

从路由坐标创建一个HERE HDLM阅读器。如果您以前没有设置HERE HDLM凭据,则会出现一个对话框提示您输入凭据。读取器包含路线经过的两个地图块的地图数据。
Reader = Herehdlmreader(Lat,Lon);
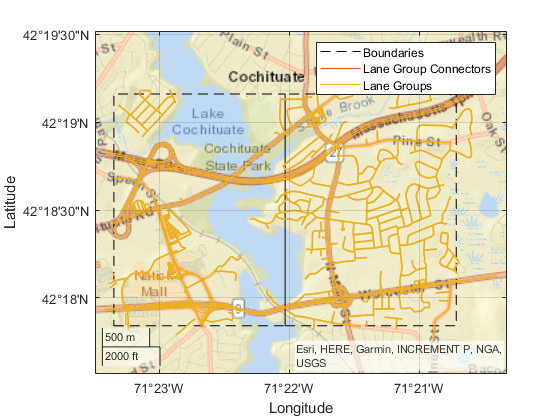
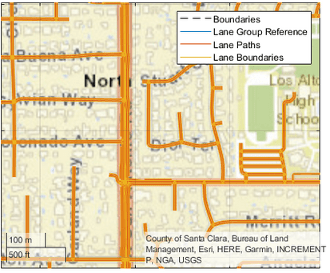
读取车道拓扑数据LaneTopology地图瓷砖层。绘制车道拓扑。
lanetopology =读(读者,'lanetopology');情节(Lanetopology)
在地图上覆盖路线数据。
抓住在Geoplot(Lat,Lon,“bo - - - - - -”那'显示名称'那“路线”);抓住从

覆盖地理播放器上的车道拓扑数据。再次划分路线。
情节(Lanetopology,“轴”player.Axes)为了IDX = 1:长度(LAT)绘图(播放器,LAT(IDX),LON(IDX))结尾

在自定义Basemap上绘制3-D车道几何
使用此处HD Live Map(此处HDLM)Web服务从地图图块读取3-D线几何数据。然后,请绘制OpenStreetMap®AcaMap上的数据。
在这里创建一个HDLM阅读器,用于代表德国柏林区域的地图图号。如果您以前没有设置HERE HDLM凭据,则会出现一个对话框提示您输入凭据。
Tiled = UInt32(377894435);Reader = Herehdlmreader(Tileid);
将OpenStreetMap BaseMap添加到可用于此处HDLM服务的BaseMaps列表中。添加BaseMap后,您无需在将来会话中再次添加它。
名称='OpenStreetMap';url ='https://a.tile.openstreetmap.org/wlaysz} / $$$$$$} .png';版权= char(UINT8(169));归因=版权+“OpenStreetMap贡献者”;addcustombasemap(名称,URL,'归因',归因)
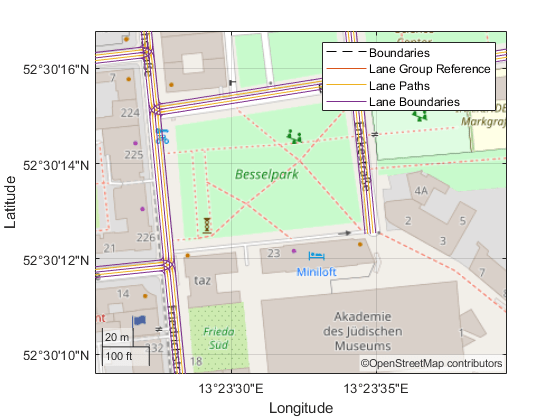
读取3-D车道几何数据巷道romerypolyline.贴图贴图的图层。在上绘制车道几何图形OpenStreetMap.基础图。
LaneGeometryPolarine =读取(读者,“LaneGeometryPolyline”);gx =图(巷道训练序列);GeobaseMap(GX,'OpenStreetMap')

放大地图平铺的中心坐标。
拉茨中心= LaneGeometryPoline.TilleCenterHere3dCoords.HERE2DCOURE(1);Loncenter = LaneGeometryPoline.TilecenterHere3dcoords.HERE2DCOURE(2);offset = 0.001;Latlim = [LatCenter-Offset,LatCenter + Offset];lonlim = [loncenter-offset,loncenter + offset];地理(Latlim,Lonlim)
输入参数
dirlaydata.-这里HDLM层数据
巷道romerypolyline.目的|LaneTopology目的|TopologyGeometry目的
这里HDLM层数据绘图,指定为表中所示的图层对象之一。
| 层对象 | 描述 | 样本图 |
|---|---|---|
巷道romerypolyline. |
3-D车道几何形状由连接到折线的一组3-D点组成。 |
|
LaneTopology |
HD Lane模型拓扑,包括Lane组拓扑、Lane组连接器拓扑、Lane拓扑和Lane连接器拓扑。该层还包含车道模型的简化的二维边界几何,用于确定贴图贴图的亲和性和溢出。 |
|
TopologyGeometry |
道路的拓扑和二维线形几何。这一层还包含地图贴图中的链接(街道)和节点(路口和死胡同)的定义。 |
|


从被选中的贴图中获得这些图层hereHDLMReader对象,使用读功能。
gxIn-地理轴,用于绘制数据
GeographicAxes目的
用于绘制数据的地理轴,指定为GeographicAxes对象。[2]
输出参数
也可以看看
[1]您需要输入单独的协议在这里为了访问HDLM服务,并获取所需的凭据(Access_key_ID和Access_key_secret)使用此处服务。
[2]对齐边界和区域标签是数据供应商提供的特性的一种表示,并不意味着MathWorks认可®。
你也可以从以下列表中选择一个网站:
