主要内容
计算边界模型
获得Y-给定车道边界坐标x-坐标
描述
例子
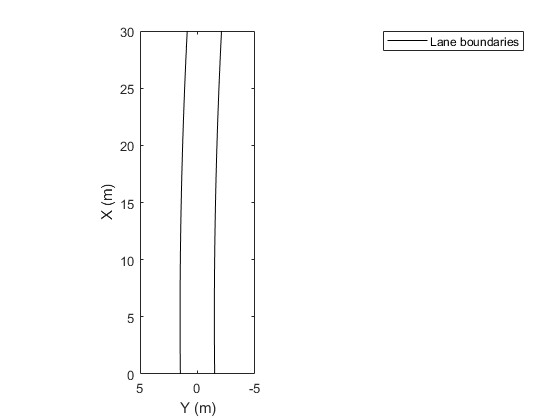
计算车道边界
创建一个抛物线基对象对车道边界进行建模。计算车道沿一组边界的位置x-轴线位置。
指定抛物线参数并创建车道边界模型。
抛物线图=[-0.005 0.15 0.55];lb=抛物线基元(抛物线图);
计算Y-给定轴的轴位置x-安装在车辆前部的摄像头传感器范围内的轴位置。
xWorld=3:30;%以米为单位yWorld=计算边界模型(lb,xWorld);
绘制车道边界点。若要拟合坐标系,请翻转轴顺序并更改x-方向。
绘图(yWorld、xWorld)轴相同的set(gca,“XDir”,“反向”)

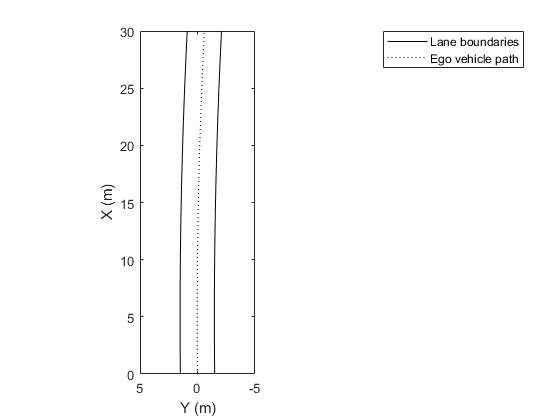
Ego车辆的绘图路径
创建一条3米宽的车道。
lb=抛物线基([-0.001,0.01,1.5]);rb=抛物线基([-0.001,0.01,-1.5]);
沿道路从0到30米手动计算车道边界模型x-轴心国。
xWorld=(0:30)';yLeft=计算边界模型(lb,xWorld);yRight=计算边界模型(rb,xWorld);
创建鸟瞰图和车道边界绘图仪。在鸟瞰图上显示车道信息。
bep=鸟瞰图(“XLimits”,[0 30],“YLimits”,[-5 5]); lanePlotter=LaneBondaryPlotter(bep,“显示名称”,“车道边界”);绘图LaneBoundary(lanePlotter,{[xWorld,yLeft],[xWorld,yRight]});
创建路径绘图仪。创建并显示通过车道中心的ego车辆的路径。
yCenter=(yLeft+yRight)/2;egoPathPlotter=路径绘图仪(bep,“显示名称”,“自我车辆路径”);绘图路径(egoPathPlotter,{[xWorld,yCenter]});
寻找候选车道边界
从车道边界数组中查找候选车道边界。
创建一个立方体车道边界数组。
lbs=[CubiclaneBundary([-0.0001,0.0,0.003,1.6]),...立方体基础([-0.0001,0.0,0.003,4.6]),...立方体基础([-0.0001,0.0,0.003,-1.6]),...立体基准([-0.0001,0.0,0.003,-4.6]);
对于每个车道边界,计算Y-轴的位置,在该位置x-坐标为0。
xWorld=0;%仪表yWorld=计算边界模型(lbs,0);
使用计算出的位置查找最符合条件的车道边界。
leftEgoBoundaryIndex=find(yWorld==min(yWorld(yWorld>0));rightEgoBoundaryIndex=find(yWorld==max(yWorld(yWorld<=0));leftEgoBoundaryIndex=lbs(leftEgoBoundaryIndex);rightEgoBoundaryIndex=lbs(rightEgoBoundaryIndex);
使用鸟瞰图和车道边界绘图仪绘制边界。
bep=鸟瞰图(“XLimits”,[0 30],“YLimits”,[-5 5]); lbPlotter=laneBoundaryPlotter(bep,“显示名称”,“左车道边界”,“颜色”,“r”);RB绘图仪=laneBoundaryPlotter(bep,“显示名称”,“右车道边界”,“颜色”,“g”);绘图仪基础(lbPlotter,leftEgoBoundary)绘图仪基础(rbPlotter,rightEgoBoundary)

输入参数
扩展能力
R2017a中引入
您还可以从以下列表中选择网站:
