欧拉
四元数转换到欧拉角(弧度)
描述
为:eulerAngles=欧拉(季,rotationSequence,rotationType)季,一ñ-by-3的欧拉角矩阵。
例子
输入参数
季-四元数转换到欧拉角
纯量|向量|矩阵|多维数组
四元数转换为欧拉角,指定为一个标量,矢量,矩阵,或四元数的多维数组。
数据类型:四元
rotationSequence-旋转顺序
'ZYX'|'ZYZ'|'ZXY'|'ZXZ'|'YXZ'|'YXY'|'YZX'|'XYZ'|“新亚芯”|'XZY'|'XZX'
欧拉表示的旋转序列,指定为字符向量或字符串。
旋转序列定义围绕轴线旋转的顺序。例如,如果你指定的旋转序列'YZX':
第一旋转是关于y轴。
第二旋转是有关新的z轴。
第三旋转是有关新的X轴。
数据类型:烧焦|串
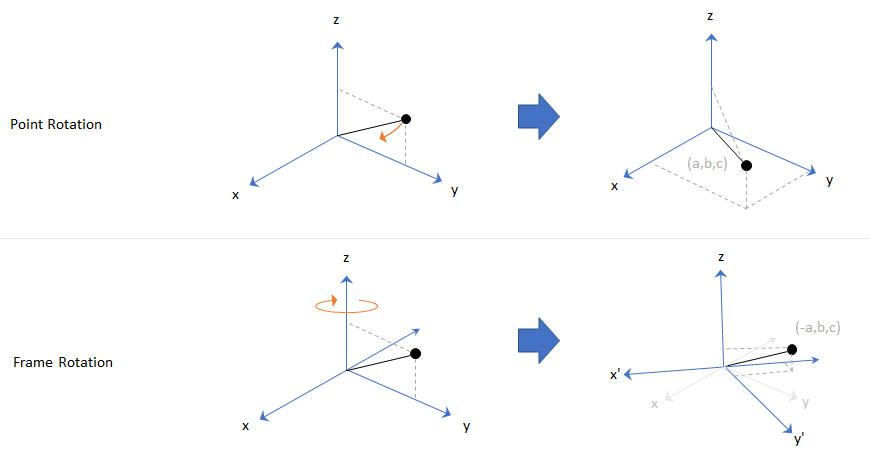
rotationType-旋转型
'点'|'帧'
旋转类型,指定为'点'要么'帧'。
中的一个点旋转,所述框架是静态的和点移动。在一个框架旋转,所述点是静态的,所述框架移动。点旋转和框架旋转限定等效的角位移,但方向相反。
数据类型:烧焦|串
输出参数
扩展功能
介绍了在R2020a
您还可以选择从下面的列表中的网站:
