dsp。MedianFilter
中值滤波器
描述
这个dsp。MedianFilter系统对象™ 沿每个通道独立计算输入信号随时间的移动中值。对象使用滑动窗口方法计算移动中值。在该方法中,在每个通道上逐个采样移动指定长度的窗口,对象计算窗口中数据的中值。有关详细信息,请参阅算法.
要计算输入的移动中值,请执行以下操作:
创建
dsp。MedianFilter对象并设置其属性。使用参数调用对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?.
创造
描述
medFilt= dsp。MedianFiltermedFilt,使用默认属性。
medFilt= dsp。MedianFilter (Len)WindowLength财产Len.
medFilt = dsp.MedianFilter(名称、值)指定WindowLength使用名称,值一对
例子:
movMin=dsp.MedianFilter(“WindowLength”,5);
性质
对象的功能
要使用对象函数,请将系统对象指定为第一个输入参数。例如,释放名为的系统对象的系统资源obj,使用下面的语法:
发行版(obj)
例子
用中值滤波去除高频噪声
使用中值滤波器从带噪正弦波信号中过滤高频噪声。比较中值滤波器和平均滤波器的性能。
初始化
建立了一个dsp。MedianFilter对象,medFilt,及dsp.MovingAverage对象,movavgWin.这些对象使用窗口长度为7的滑动窗口方法。创建用于查看输出的时间范围。
Fs = 1000;medFilt = dsp.MedianFilter (7);movavgWin = dsp.MovingAverage (7);范围= timescope (“采样器”Fs,...“TimeSpanSource”,“属性”,...“TimeSpanOverrunAction”,“滚动”,...“时间跨度”, 1“ShowGrid”符合事实的...“YLimits”3 [3],...“LayoutDimensions”,[3 1],...“NumInputPorts”,3); scope.ActiveDisplay=1;范围.标题=“信号+噪声”;范围。ActiveDisplay = 2;范围。Title ='移动平均输出(窗口长度= 7)';范围。ActiveDisplay = 3;范围。Title ='中值滤波器输出(窗口长度= 7)';FrameLength = 256;数= 1;正弦= dsp。SineWave (“采样器”Fs,“频率”,10,...“SamplesPerFrame”, FrameLength);
滤除噪声正弦波
生成频率为10 Hz的带噪正弦波信号。对信号应用中值滤波器和移动平均对象。在时间范围上查看输出。
对于i=1:500 hfn=3*(rand(FrameLength,1)<0.02);x=sine()+1e-2*randn(FrameLength,1)+hfn;y1=movavgWin(x);y2=medFilt(x);范围(x,y1,y2);终止
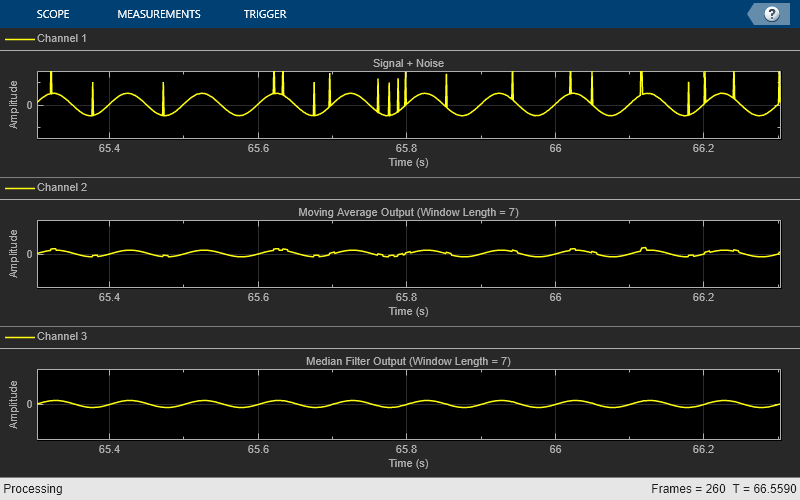
中值滤波器比移动平均目标更有效地去除高频噪声。
从陀螺仪数据中去除高频噪声
这个例子展示了如何从流信号中去除高频异常dsp。MedianFilter系统对象?。
使用dsp。MatFileReader系统对象读取陀螺仪MAT文件。陀螺仪MAT文件包含3列数据,每列包含7140个样本。这三列代表X-轴心国,Y-轴线,以及Z-轴数据从陀螺仪运动传感器。选择714个样本的帧大小,使每一列数据包含10个帧。这个dsp。MedianFilter系统对象使用窗口长度为10。创建一个timescope对象以查看过滤后的输出。
读者= dsp。MatFileReader (“SamplesPerFrame”,714,“文件名”,“LSM9DS1gyroData73.mat”,...“VariableName”,“数据”);medFilt = dsp.MedianFilter (10);范围= timescope (“NumInputPorts”, 1“采样器”, 119,“YLimits”(-300 300),...“ChannelNames”,{“输入”,“过滤输出”},...“TimeSpanSource”,“属性”,“时间跨度”现年60岁的“ShowLegend”,对);
滤波陀螺仪数据使用dsp。MedianFilter系统对象。查看已筛选的Z-轴数据在时间范围内。
对于i=1:10 gyroData=reader();filteredData=medFilt(gyroData);scope([gyroData(:,3),filteredData(:,3)];终止
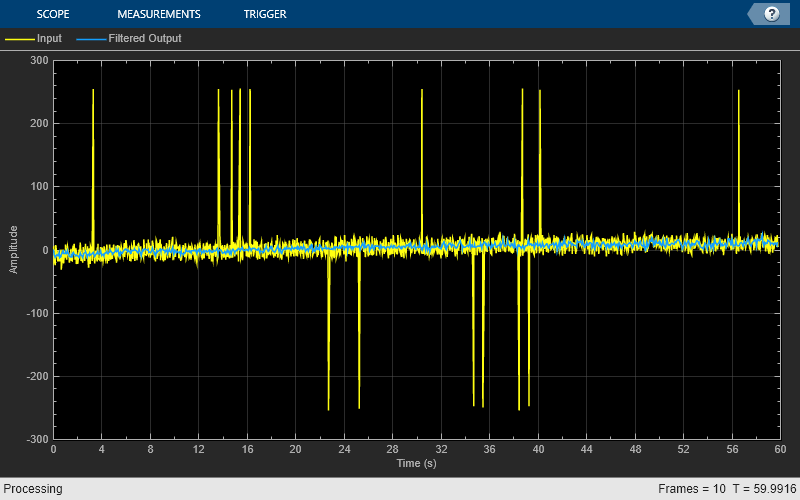
原始数据包含几个异常值。放大数据以确认中值滤波器删除了所有异常值。
算法
滑动窗口方法
在滑动窗口法中,每个输入样本的输出是当前样本和Len-1.以前的样品。Len为样本中窗口的长度。来计算第一个Len- 1输出,当窗口没有足够的数据时,算法用零填充窗口。例如,当第二个输入样本进入时,为了计算中值,算法填充窗口Len- 2 0。数据矢量,x,然后是两个数据样本,后跟Len- 2 0。随着时间的推移,该对象对输入数据执行中值过滤。
考虑使用滑动窗口方法计算流输入数据的移动中值的例子。该算法使用的窗口长度为4。对于每个输入样本,长度为4的窗口将沿着数据移动。

参考文献
[1] Bodenham,院长。流数据的自适应过滤和变化检测博士论文。伦敦帝国理工学院,2012年。
扩展能力
另见
物体
dsp.MovingAverage|dsp.MOVINGMAX|dsp。MovingMinimum|dsp。MovingRMS|dsp。MovingStandardDeviation|dsp。MovingVariance
块
你也可以从以下列表中选择一个网站: