主要内容
mergeDetections
将检测合并为集群检测
语法
描述
clusteredDetections= mergeDetections (检测,clusterIndex)时间,SensorIndex,ObjectClassID,MeasurementParameters,ObjectAttributes属性或字段。
clusteredDetections= mergeDetections (___MergingFcn =mergeFcn)
例子
合并检测以生成集群检测
生成两个带有两个错误警报的检测簇。
rng (2021)%用于可重复的结果x1 = [5;5;0] + randn(3、4);群集1中有四个检测x2 = [5;5;0] + randn(3、4);群集二中有四个检测xFalse = 30 * randn (3 2);%两次误报x = [x1 x2 xFalse];
将这些检测格式化为单元格数组objectDetection对象。
检测= repmat ({objectDetection (0, 0;0;0)}, 10日1);为I = 1:10检测{I}。测量= x(:,我);结束
根据前面定义的场景定义集群索引。通常可以通过在检测上应用聚类算法来获得聚类索引。
clusterIndex = [1;1;1;1;2;2;2;2;3;4);
使用mergeDetections命令功能合并检测。
clusteredDetections = mergeDetections(检测、clusterIndex);
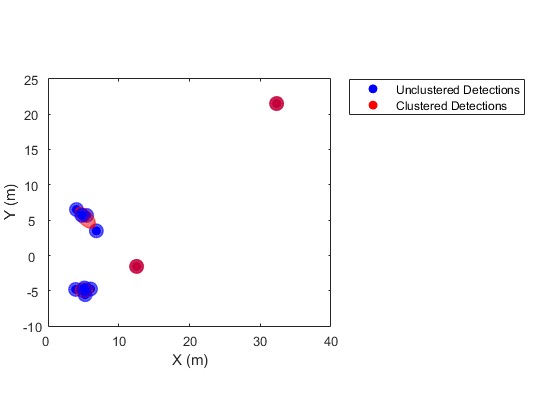
在戏剧情节中想象结果。
创建一个theaterPlot对象。tp = theaterPlot;%创建两个检测绘图器,一个用于非聚集检测,一个用于%集群检测。detPlotterUn = detectionPlotter (tp, DisplayName =“未聚集的检测”,...MarkerFaceColor =“b”MarkerEdgeColor =“b”);detPlotterC = detectionPlotter (tp, DisplayName =“集群检测”,...MarkerFaceColor =“r”MarkerEdgeColor =“r”);%连接测量和协方差的非聚集检测detArray =(检测{:});荀= horzcat (detArray.Measurement)”;双关语=猫(3、detArray.MeasurementNoise);为聚集检测连接测量和协方差clusteredDetArray = [clusteredDetections {}):;xC = horzcat (clusteredDetArray.Measurement)”;电脑=猫(3、clusteredDetArray.MeasurementNoise);%绘制所有未聚类和聚类检测plotDetection (detPlotterUn荀,双关);plotDetection (detPlotterC xC、PC);
输入参数
输出参数
另请参阅
介绍了R2021b
你也可以从以下列表中选择一个网站: