主要内容
监察系统的追踪
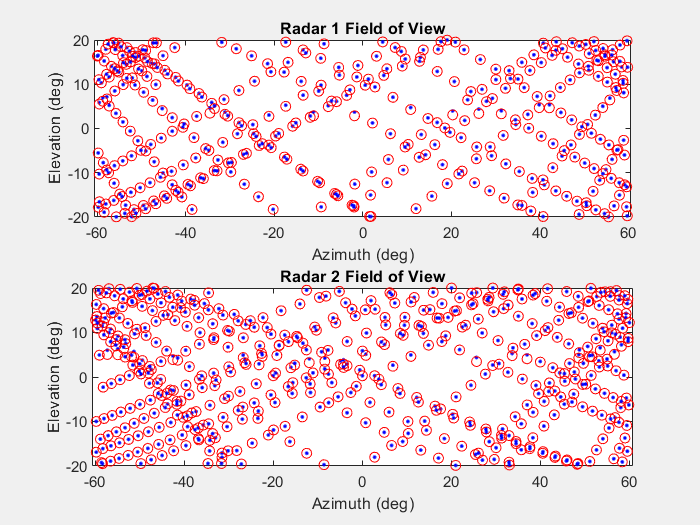
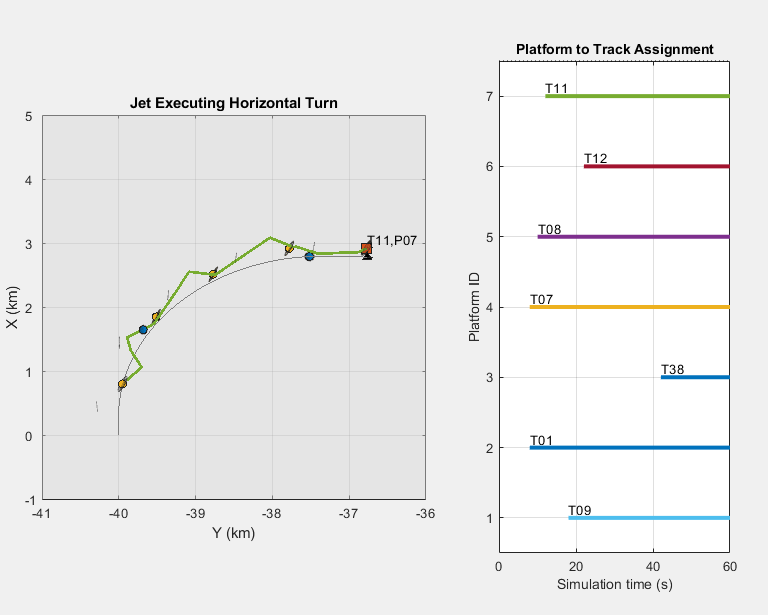
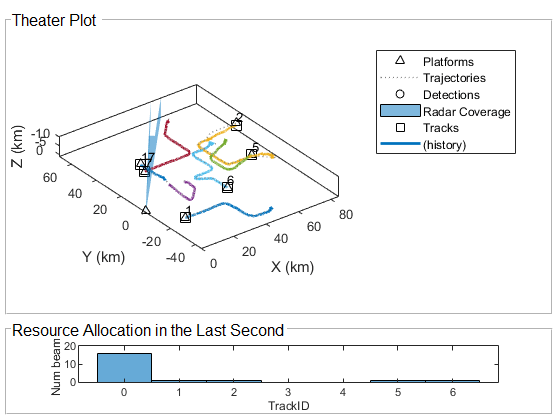
利用主动和被动传感器检测对监视区域的目标进行跟踪
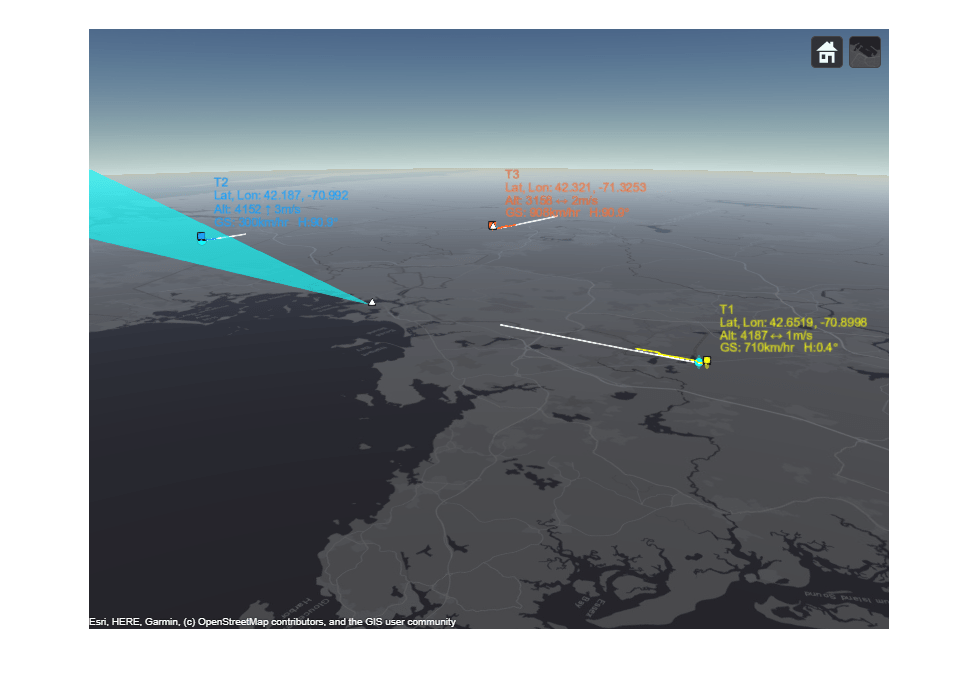
这些例子展示了雷达监视系统的跟踪应用,包括空中交通管制、海洋监视、跟踪空间碎片,以及使用多平台、双基地和被动探测的通用雷达探测融合。
特色的例子

你也可以从以下列表中选择一个网站:
这些例子展示了雷达监视系统的跟踪应用,包括空中交通管制、海洋监视、跟踪空间碎片,以及使用多平台、双基地和被动探测的通用雷达探测融合。
你也可以从以下列表中选择一个网站: