主要内容
imgradientxyz
找到三维图像的方向梯度
描述
例子
使用Sobel方法计算三维方向图像梯度
读取3-D数据并为处理做好准备。
volData =负载(“核磁共振”);深圳= volData.siz;卷=挤压(volData.D);
计算方向梯度。
[Gx, Gy, Gz] = imgradientxyz(vol);
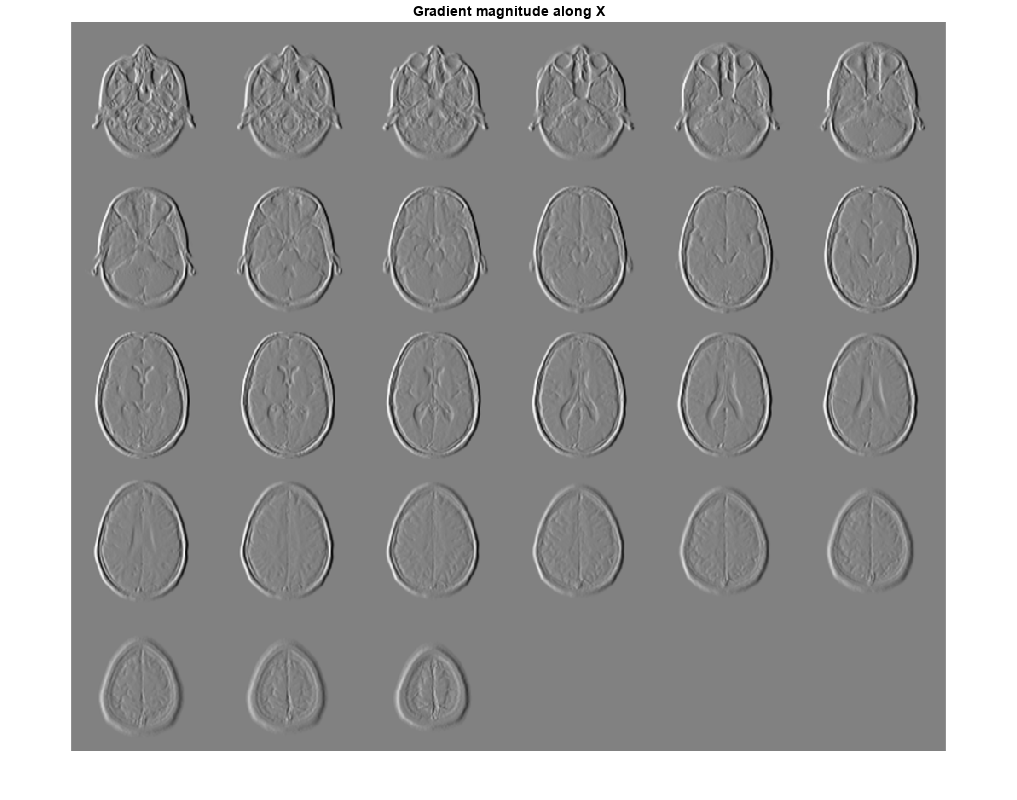
将方向渐变可视化为蒙太奇。
图中,蒙太奇(重塑(Gx、深圳(1)、深圳(2),1,深圳(3)),“DisplayRange”[])标题(“沿X方向的梯度大小”)
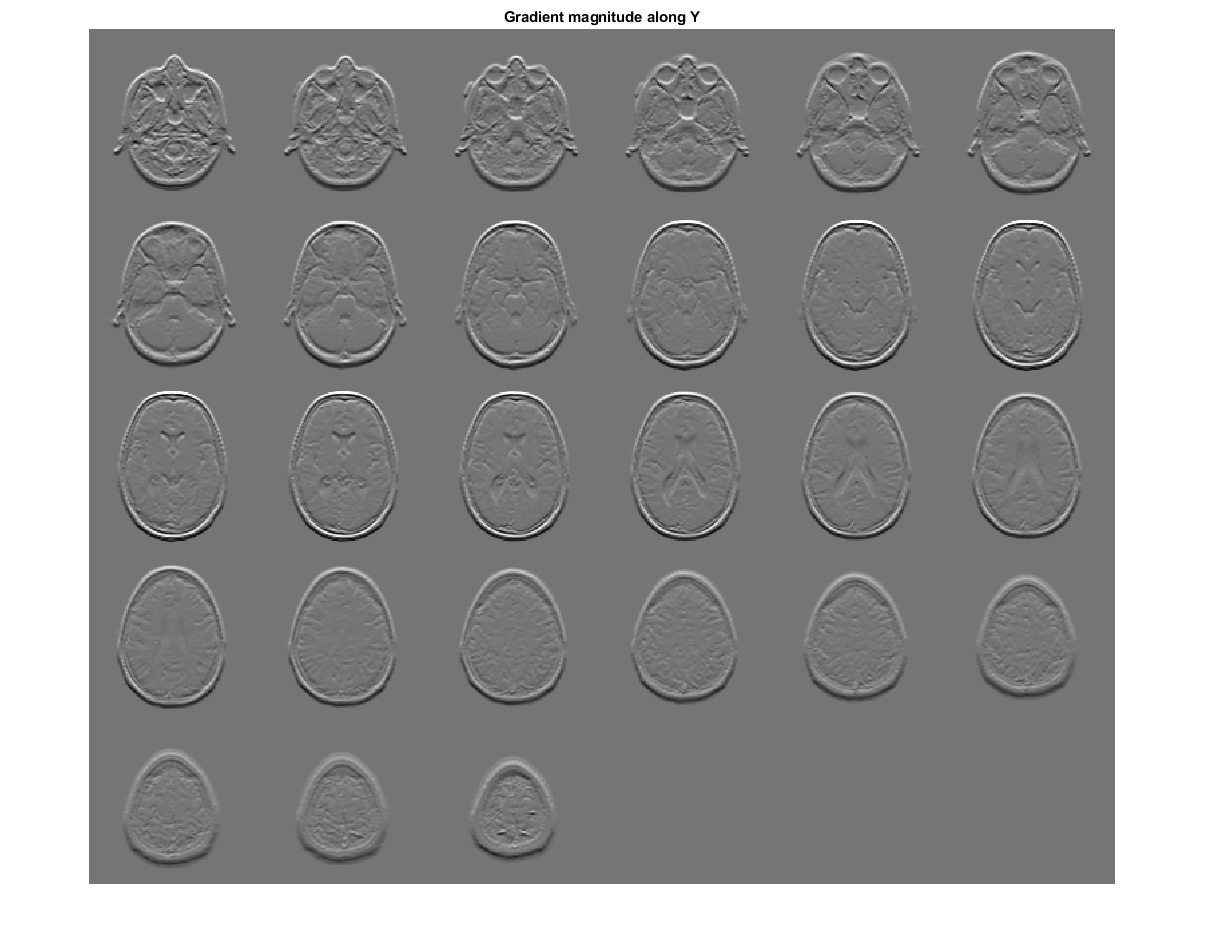
图中,蒙太奇(重塑(Gy、深圳(1)、深圳(2),1,深圳(3)),“DisplayRange”[])标题('沿Y方向的梯度大小')
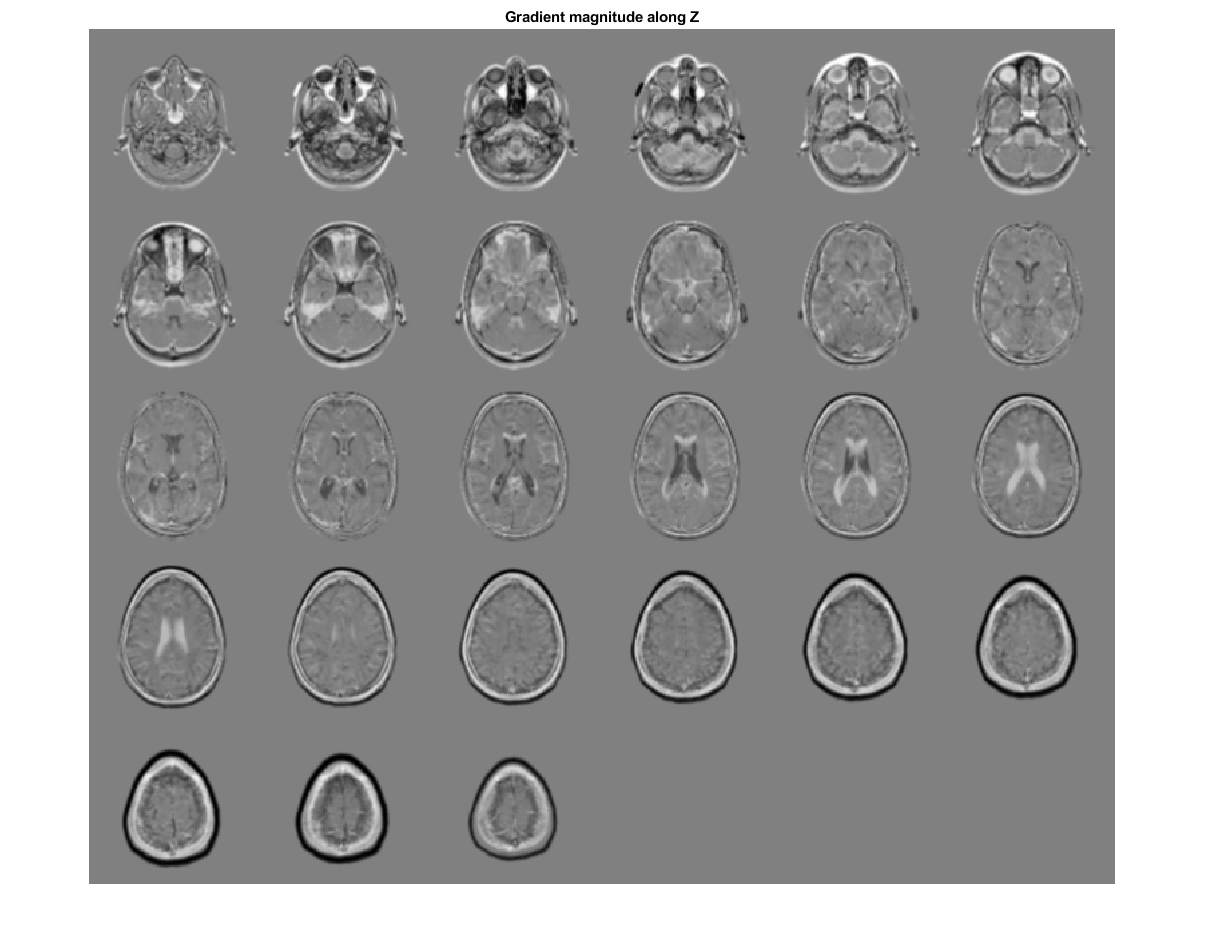
图中,蒙太奇(重塑(广州、深圳(1)、深圳(2),1,深圳(3)),“DisplayRange”[])标题('沿Z方向的梯度大小')
输入参数
输出参数
算法
imgradientxyz不归一化梯度输出。如果梯度输出图像的范围必须匹配输入图像的范围,考虑对梯度图像进行归一化,取决于方法参数使用。例如,对于Sobel核,归一化因子是1/44,对于Prewitt,归一化因子是1/18。
扩展功能
介绍了R2016a
你也可以从以下列表中选择一个网站:
