Para2fan.
将平行束投影转换为风扇束
句法
描述
[返回风扇光束传感器位置F那fan_sensor_positions.那fan_rotation_angles.] = FAN2PARA(___)fan_sensor_positions.和旋转角度fan_rotation_angles.。
例子
将平行束投影转换为风扇束投影
生成并联束投影
pH =幻影(128);Theta = 0:180;[p,xp] =氡(pH,θ);imshow(p,[],'xdata',θ,'ydata',XP,'InitialMagnification'那'合身')轴普通的标题('平行束投影')Xlabel('\ theta(deacte)')ylabel('X''')Colormap(GCA,Hot),彩色杆

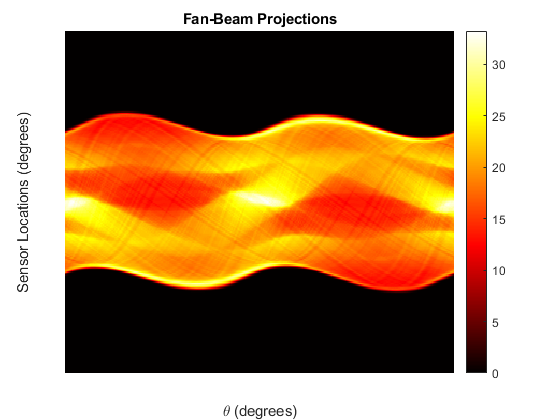
转换为风扇束投影
[F,FPO,Fangles] = Para2Fan(P,100);图imshow(f,[],'xdata',毛茸茸,'ydata',fpos,'InitialMagnification'那'合身')轴普通的标题('粉丝投影')Xlabel('\ theta(deacte)')ylabel('传感器位置(度)')Colormap(GCA,Hot),彩色杆
输入参数
P.-并行束投影数据
数字矩阵
并行光束投影数据指定为数字矩阵。每列P.在一个旋转角度包含并行波束数据。列数表示并行波束旋转角度的数量,并且行的数量表示并行波束传感器的数量。
数据类型:双倍的|单身的
D.-风扇梁顶点到旋转中心的距离
正数
风扇光束顶点的距离为旋转中心,指定为正数。Para2fan.假设旋转中心是投影的中心点,其被定义为CEIL(尺寸(f,1)/ 2)。的价值D.必须大于或等于Parallelsensorspacing.*(尺寸(p,1)-1)/ 2
该图说明了D.关于一个风扇光束投影的风扇束顶点。

数据类型:双倍的|单身的
名称值对参数
指定可选的逗号分离对名称,价值论点。姓名是参数名称和价值是相应的价值。姓名必须出现在引号内。您可以以任何顺序指定多个名称和值对参数name1,value1,...,namen,valuen。
f = para2fan(p,d,'fanrotationIncrement',5)
'fanrotationIncrement'-风扇束旋转角度增量
正标量
扇形束旋转角度增量以度为单位,指定为逗号分隔对组成'fanrotationIncrement'和正标量。
如果
施南是'循环', 然后360 /FanotoRationIncrement.必须是一个整数。如果您未指定
FanotoRationIncrement.,然后默认值等于并行波束旋转角度。

数据类型:双倍的


'fansensorspacing'-风扇梁传感器间距
正标量
扇形梁传感器间距,指定为逗号分隔对组成'fansensorspacing'和正标量。
如果
Fansensorgeometh是'弧', 然后粉底扇属性定义度数的角间距。如果
Fansensorgeometh是'线', 然后粉底扇属性定义风扇波束之间的线性距离,以像素为单位。线性间距测量X'轴。
如果您未指定Fansensorgeometh,然后是默认值粉底扇属性是暗示的最小值Parallelsensorspacing.这样:
如果
Fansensorgeometh是'弧', 然后粉底扇属性是180 / pi * asin(Parallelsensorspacing./D.)如果
Fansensorgeometh是'线', 然后粉底扇属性是D.* asin(Parallelsensorspacing./D.)
数据类型:双倍的
'插值'-插值类型
'线性'(默认)|'最近'|'样条曲线'|'pchip'
并行波束数据之间使用的插值类型,指定为包括的逗号分隔对'插值'和其中一个值。
'最近'- 最近的邻居
'线性'- 线性(默认)
'样条曲线'- 分段立方样条
'pchip'- 分段立方Hermite(PCHIP)
'平行覆盖物'-平行梁旋转范围
'halfcycle'(默认)|'循环
并行束旋转范围,指定为逗号分隔对组成'平行覆盖物'和其中一个值。
'循环'- 并行数据涵盖[0,360)度的全系列。'halfcycle'- 并行数据覆盖[0,180)度。
'parallelsensorspacing'-平行梁传感器间距
1|正标量
平行梁传感器以像素为单位,指定为逗号分隔对组成'parallelsensorspacing'和正标量。
数据类型:双倍的
输出参数
您还可以从以下列表中选择一个网站:
