readPointCloud
从LAS或LAZ文件读取点云数据
句法
Description
[[读取指定的点属性ptcloud,,,,ptattributes] = readPointCloud(Lasreader,“属性”,ptAtt)ptAttfrom a LAS or LAZ file. In addition to the point cloud, the function returns the specified attributes of each point in the point cloud.
[[___] = readPointCloud(___,,,,除了以前的语法中的任何参数组合外,还使用一个或多个名称值对参数指定选项。例如,名称,价值)“ ROI”,,,,[5 10 5 10 5 10]sets the region of interest (ROI) in which the function reads the point cloud.
Examples
Read Point Cloud Data from LAZ File
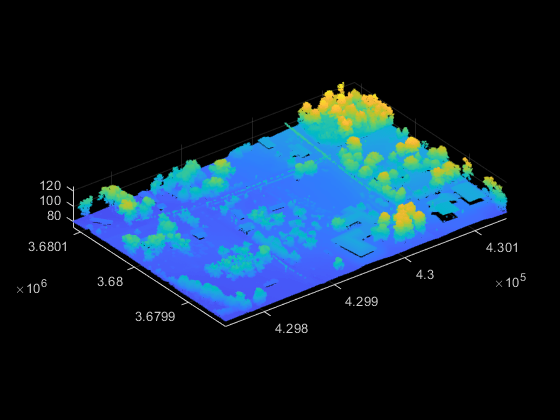
This example shows how to read and visualize point cloud data from a LAS / LAZ file.
创建一个lasFileReaderLAZ文件的对象。然后,使用readPointCloudfunction to read point cloud data from the LAZ file and generate apointCloud目的。
创建一个lasFileReader目的to access the LAZ file data.
path = fullfile(toolboxdir(“ LIDAR”),“ Lidardata”,,,,。。。"las",,,,“ Aeriallidardata.laz”);Lasreader= lasFileReader(path);
使用laz文件读取点云数据readPointCloud功能。
ptcloud= ReadPointCloud(Lasreader);
可视化点云。
figure pcshow(ptCloud.Location)
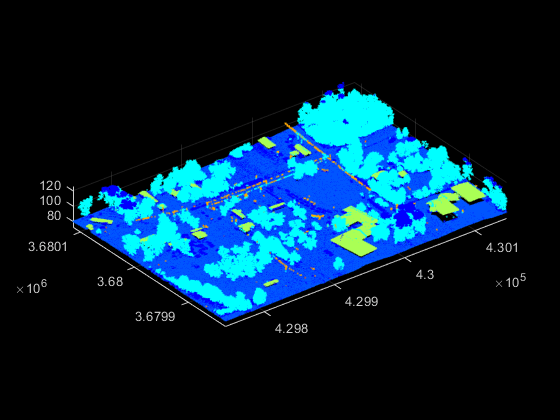
Visualize Point Cloud Based on Classification Data from LAZ File
基于LAZ文件的分类数据划分和可视化点云数据。
创建一个lasFileReader对象可以从LAZ文件访问数据。
path = fullfile(toolboxdir(“ LIDAR”),“ Lidardata”,,,,。。。"las",,,,“ Aeriallidardata.laz”);Lasreader= lasFileReader(path);
使用LAZ文件读取点云数据和关联的分类点属性readPointCloud功能。
[ptcloud,pointattributes] = readpointcloud(lasreader,,"Attributes",,,,“分类”);
根据其分类属性为点上色。将标签图像重塑为点云的形状。
labels = label2rgb(pointAttributes.Classification);colordata = reshape(标签,[],3);
可视化颜色编码点云。
图PCSHOW(PTCLOUD.Location,Colordata)
输入参数
Output Arguments
版本历史记录
在R2020b中引入您还可以从以下列表中选择一个网站:
美洲
- América Latina(Español)
- 加拿大(English)
- 美国(English)
欧洲
- Netherlands(English)
- 挪威(English)
- Österreich(德意志)
- 葡萄牙(English)
- Sweden(English)
- 瑞士
- United Kingdom(English)