奇迹课程控制参考
计算感应电动机磁场定向控制的参考电流
- 库:
电机控制模块/控制/控制参考
描述
的奇迹课程控制参考块计算d设在和问-轴参考电流,用于磁场定向控制(和磁场减弱)操作。
该块接受参考扭矩和反馈机械速度,并输出相应的d- - -问相互重合的参考电流。
该模块通过求解数学关系来计算参考电流值。计算使用国际单位制。当使用Per-Unit (PU)系统时(使用输入单元参数设置为单位(PU)),该块将PU输入信号转换为SI单位来执行计算,并将它们转换回输出的PU值。
这些方程描述了块如何计算引用d设在和问设在当前值。
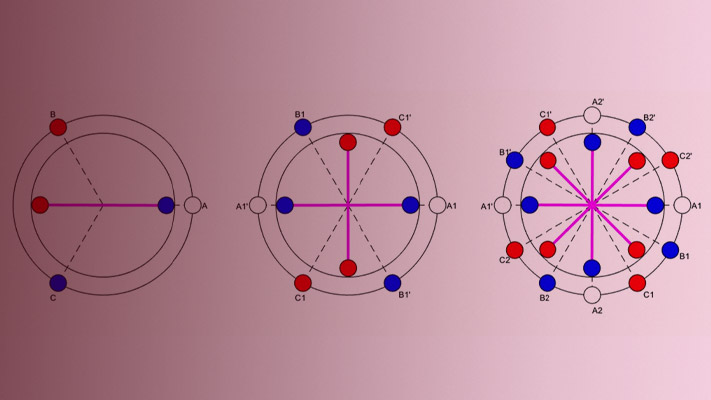
感应电动机的数学模型
这些模型方程描述了感应电动机在转子磁链参考系中的动力学:
机器的电感表示为:
定子电压表示为:
在前面的方程中,通量连杆可以表示为:
如果我们保持转子磁通不变d-轴对准转子磁链参考系,则可以得出:
这些方程描述了机械动力学,
这些方程描述了滑移速度,
参考电流计算
这些方程显示了参考电流的计算,
在基速和弱磁场区域下运行时,参考电流的计算方法不同,
如果 :
如果 :
这些方程表明问设在当前计算,
该块输出以下值:
地点:
为电机的极对数。
为定子相绕组电阻(欧姆)。
是指定子的转子电阻(欧姆)。
是定子漏电感(亨利)。
是转子漏感(亨利)。
是定子电感(亨利)。
是磁化电感(亨利)。
是指定子的转子电感(亨利)。
为感应电动机的总漏电系数。
为转子时间常数(秒)。
和 是定子d- - -问设在电压(伏)。
和 是定子d- - -问设在电流(安培)。
是额定d定子的-轴电流也称为磁化电流(安培)。
为电机的最大相电流(峰值)(安培)。
是d定子的-轴磁链(韦伯)。
是问定子的-轴磁链(韦伯)。
是d转子的-轴磁链(韦伯)。
是问转子的-轴磁链(韦伯)。
为转子的电滑移速度(弧度/秒)。
为转子的机械滑移速度(弧度/秒)。
为与定子电压频率相对应的电速(弧度/秒)。
为转子机械速度(弧度/秒)。
为转子电速(弧度/秒)。
为电机的机械基本速度(弧度/秒)。
为电机产生的机电转矩(Nm)。
港口
输入
输出
参数
模型的例子
参考文献
[1]玻色,现代电力电子和交流驱动器。普伦蒂斯霍尔,2001年。isbn - 0 - 13 - 016743 - 6。
[2]罗伯特·D·洛伦茨,托马斯·利波,唐纳德·w·诺维特尼。"感应电动机的运动控制"IEEE论文集,第82卷,第8期,1994年8月,第1215-1240页。
[3]李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强,李国强。
[4]布里兹,费尔南多,迈克尔·w·迪格纳和罗伯特·d·洛伦兹。“利用复杂矢量分析和设计当前监管机构。”IEEE工业应用学报,第36卷,第3期,2000年5月/ 6月,第817-825页。
[5]布里兹,费尔南多等人。(感应电动机)弱磁场运行中的电流和磁通调节。IEEE工业应用学报,Vol. 37, Issue 1, Jan/Feb, 2001, pp. 42-50。
[6]R. M. Prasad和M. A. Mulla,“一种新型无位置传感器的DFIG磁场定向控制算法”,IEEE反式。维持。能源,第10卷,第5期。3,第1098-1108页,2019年7月。
扩展功能
你也可以从以下列表中选择一个网站: