航迹跟踪控制系统
使用自适应模型预测控制器模拟路径跟踪控制
- 库:
模型预测控制工具箱/自动驾驶

描述
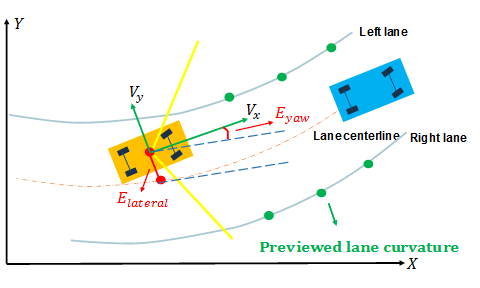
的航迹跟踪控制系统block模拟路径跟踪控制(PFC)系统,该系统使ego车辆沿着直线或弯道的中心行驶,同时跟踪设定的速度并与前车保持安全距离。为此,控制器同时调整ego车辆的纵向加速度和前转向角。块计算最优控制行动,同时满足安全距离、速度、加速度和转向角约束使用自适应模型预测控制(MPC)。
此块结合的能力车道保持辅助系统和自适应巡航控制系统块插入到单个控制器中。

要自定义您的控制器,例如利用先进的MPC功能或修改控制器的初始条件,点击创建PFC子系统。