主要内容
输入输出线性组合的约束
您可以约束植物输入和输出变量的线性组合。例如,您可以约束一个特定的操纵变量(MV),使其大于另外两个MV的线性组合。
这种限制的一般形式是:

在这里:
 为用于约束软化的QP松弛变量。有关更多信息,请参见约束软化.
为用于约束软化的QP松弛变量。有关更多信息,请参见约束软化. 是
是 以工程单位计算的可变值。
以工程单位计算的可变值。 是
是 预计的工厂产量,以工程单位计算。
预计的工厂产量,以工程单位计算。 是
是 在工程单元中测量的植物干扰输入。
在工程单元中测量的植物干扰输入。 ,
, ,
, ,
, , 和
, 和 是恒定的矩阵和矢量。有关更多信息,请参见
是恒定的矩阵和矢量。有关更多信息,请参见setConstraint..












与QP成本函数一样,使用状态观测器进行输出预测使这些约束成为QP决策变量的函数。
要设置MPC控制器的混合输入/输出约束,请使用setConstraint.功能。要从控制器获取现有约束,请使用GetConstraint..
使用混合输入/输出约束时,请考虑以下内容:
默认情况下,混合输入/输出约束是维数。
在命令行和Simulink®中都支持混合输入/输出约束的运行时更新。金宝app金宝app有关更多信息,请参见在运行时更新约束.
中不支持使用混合输入/输出约束金宝appMPC设计师.
例如,考虑具有混合输入/输出约束的双积分器设备的MPC控制器。
创建初始MPC控制器
MPC控制器的基本设置包括:
双积分器作为预测模型
预测层位20
控制水平20
输入约束:


植株= tf(1,[1 0 0]);t = 0.1;p = 20;m = 20;mpcobj = mpc(植物、t、p、m);mpcobj。MV =结构(“最小值”, 1“马克斯”1);
- - - >“权重。操控变量的“mpc”对象的属性为空。假设默认的0.00000。- - - >“权重。“mpc”对象的属性为空。假设默认的0.10000。- - - >“权重。mpc对象的属性为空。假设默认的1.00000。
定义混合输入/输出约束
约束输入的和你(t)和输出y (t)必须是非负的,小于1.2:

施加这种组合(混合)I / O约束,将其制定为涉及的一组不等式约束 和
和 .
.
使用使用的限制这些约束setConstraint.函数,设置约束常量如下:
![左$ $ E = \[{\开始{数组}{* {20}{c}} & # xA; 1 \ \ & # xA; {- 1} & # xA;结束\{数组}}\右],\;左F = \[{\开始{数组}{* {20}{c}} & # xA; 1 \ \ & # xA; {- 1} & # xA;结束\{数组}}\正确),左\;G = \[{\开始{数组}{* {20}{c}} & # xA; {1.2} \ \ & # xA; 0 & # xA;结束\{数组}}\右]$ $](http://www.tatmou.com/help/examples/mpc/win64/mpcmixedconstraints_eq10872806264070694669.png)
setconstraint (mpcobj [1; 1], [1; 1], [1.2; 0]);
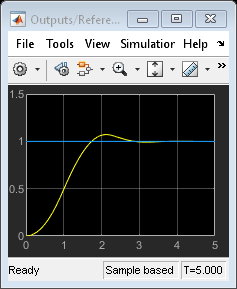
模拟控制器
在Simulink中仿真线性对象模型的闭环控制。金宝app控制器mpcobj.在MPC Controller块中指定。
mdl =“mpc_mixedconstraints”;open_system (mdl) sim (mdl)
- - - >转换”模型。将“mpc”对象的属性移植到状态空间。——>将模型转换为离散时间。假设没有干扰添加到测量输出通道#1。——>”模式。mpc对象的Noise属性为空。假设每个测量输出通道上都有白噪声。

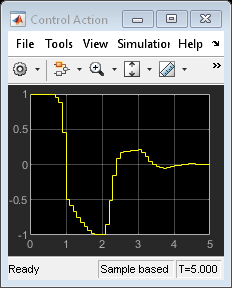
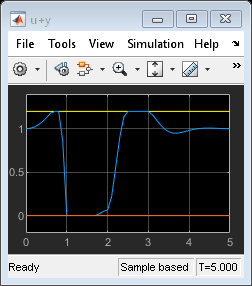
MPC控制器保留这个总和 在跟踪参考信号的同时在0到1.2之间,
在跟踪参考信号的同时在0到1.2之间, .
.
bdclose (mdl)
另请参阅
相关话题
您还可以从以下列表中选择一个网站:
