uv2azelpat
辐射模式从u / v转换形式方位/立面形式
语法
描述
例子
辐射转换模式
辐射模式转换为方位/立面形式角度间距为1°。
定义的模式u和v。因为u和v值在单位圆外不是物理,这个地区的模式值设置为0。
u = 1:0.01:1;v = 1:0.01:1;[u_grid, v_grid] = meshgrid (u, v);pat_uv =√1 - u_grid。^ 2 - v_grid。^ 2);pat_uv(函数(u_grid v_grid) > = 1) = 0;
模式转换为方位/高程空间。
pat_azel = uv2azelpat (pat_uv, u, v);
情节转换辐射模式
辐射模式转换为方位/立面形式角度间距为1°。
定义的模式u和v。因为u和v值在单位圆外不是物理,这个地区的模式值设置为0。
u = 1:0.01:1;v = 1:0.01:1;[u_grid, v_grid] = meshgrid (u, v);pat_uv =√1 - u_grid。^ 2 - v_grid。^ 2);pat_uv(函数(u_grid v_grid) > = 1) = 0;
模式转换为方位/高程空间。存储的方位角和高度角策划。
[pat_azel, az, el] = uv2azelpat (pat_uv, u, v);
情节模式。
H =冲浪(az, el, pat_azel);H。l在eStyle =“没有”;包含(的方位(度))ylabel (的海拔(度))zlabel (“模式”)

使用特定的方位/高程值转换成辐射模式
辐射模式转换为方位/立面形式,间隔5°的角度。
定义的模式u和v。因为u和v值在单位圆外不是物理,这个地区的模式值设置为0。
u = 1:0.01:1;v = 1:0.01:1;[u_grid, v_grid] = meshgrid (u, v);pat_uv =√1 - u_grid。^ 2 - v_grid。^ 2);pat_uv(函数(u_grid v_grid) > = 1) = 0;
定义的方位角和高度角样本模式。然后转换模式。
阿兹= 90:5:90;el = 90:5:90;pat_azel = uv2azelpat (pat_uv, u, v, az, el);
情节模式。
H =冲浪(az, el, pat_azel);H。l在eStyle =“没有”;包含(的方位(度))ylabel (的海拔(度))zlabel (“模式”)

输入参数
输出参数
更多关于
φ角θ角
φ角(φ从积极的角度y设在向量的正交投影yz飞机。角是积极向积极的一面z设在。φ角是在0和360度之间。θ角(θ)的角度x设在向量本身。角是积极的向yz飞机。θ角是在0和180度之间。
这个数字说明了一个向量φ和θ显示为绿色的实线。

φ/θ和之间的坐标转换阿兹/埃尔通过下面的方程来描述吗
方位角、仰角
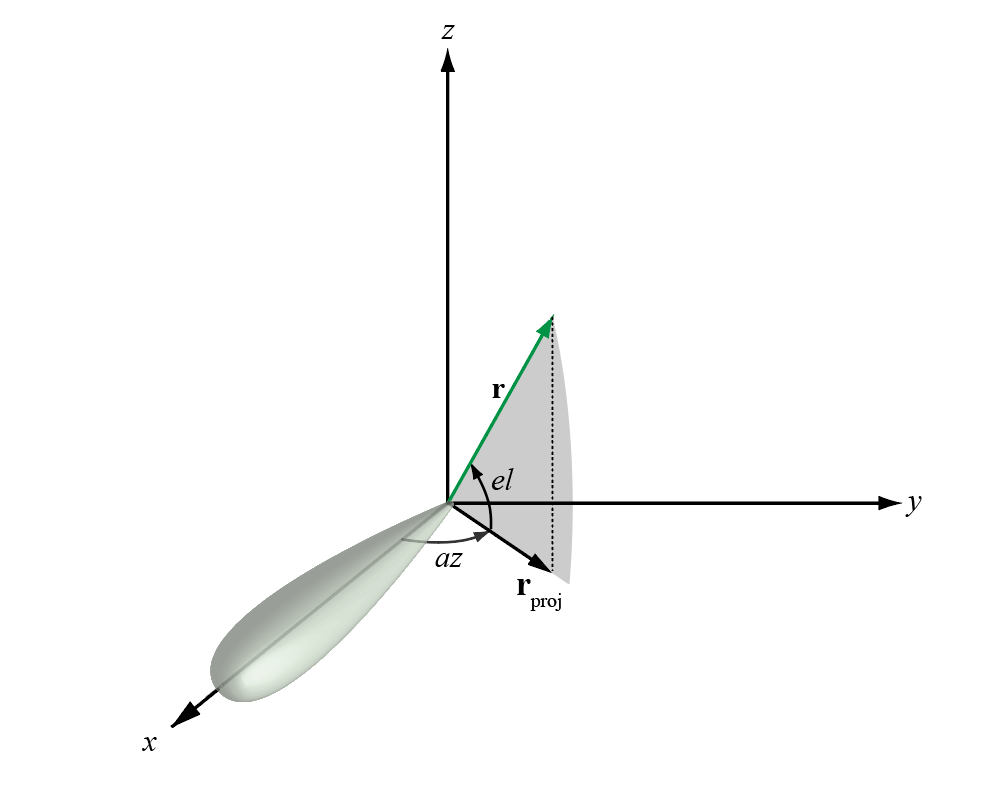
的方位角一个向量之间的角度x设在和矢量的正交投影到xy飞机。从的角度是积极的x轴向y轴。方位角度介于-180和180度。的仰角向量之间的夹角及其正交投影吗xy飞机。时角是积极向积极的一面z设在从xy飞机。默认情况下,元素或数组的瞄准线方向与积极的一面x设在。瞄准线方向的主瓣方向是一个元素或数组。
请注意
仰角有时在文献中定义为角度向量与积极的一面z设在。MATLAB®和相控阵系统工具箱™产品不使用这个定义。下载188bet金宝搏
这个数字说明了方位角和仰角矢量显示为绿色的实线。