文件帮助中心文件
探索Simscape™多体™举例说明了真实世界多体系统的建模、控制和仿真。
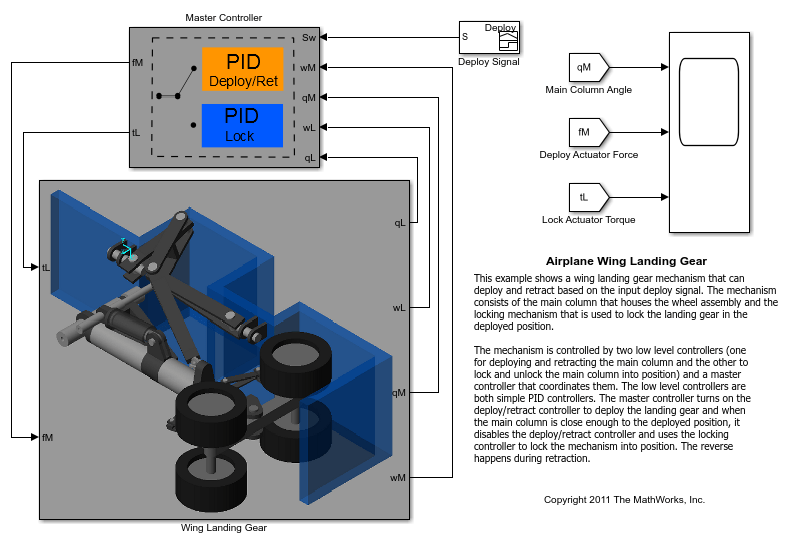
翼载齿轮机构,可以基于输入部署信号部署和缩回。该机构包括容纳车轮组件的主柱和用于将着陆齿轮锁定在展开位置的锁定机构。
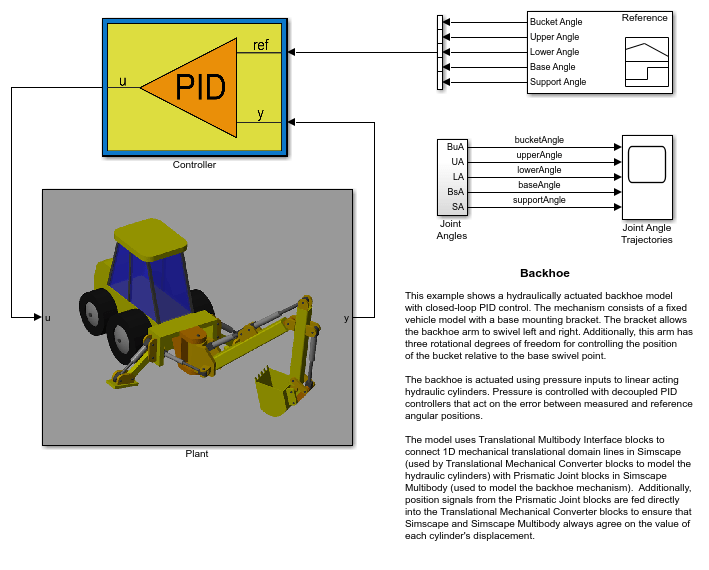
具有闭环PID控制的液压驱动的反铲模型。该机构由具有底座安装支架的固定车型组成。支架允许反铲手臂左右转动。另外,该臂具有三个旋转自由度,用于控制铲斗相对于基础旋转点的位置。
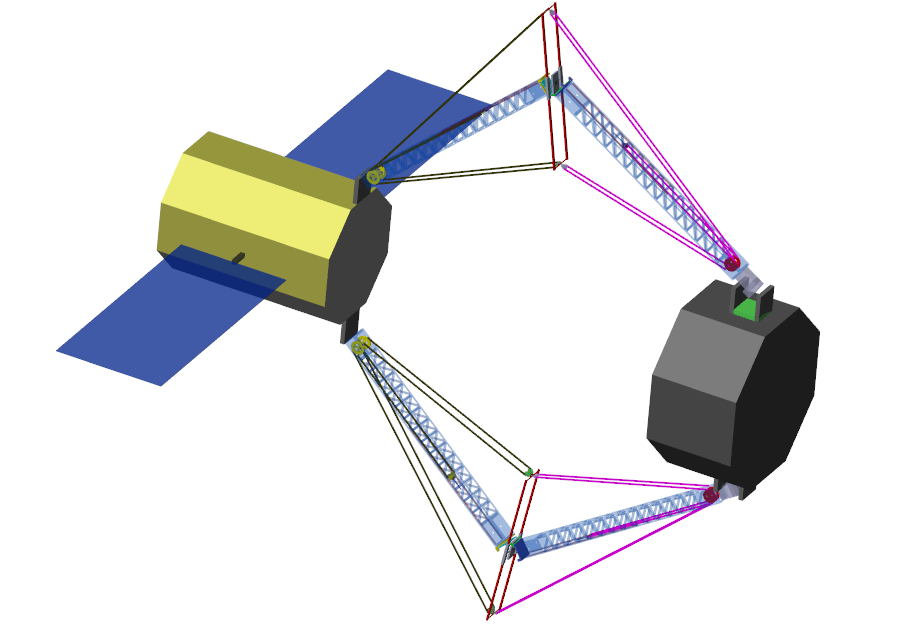
模型一个电缆驱动的空间操纵器。机械手由两个连杆通过一个转动关节系统连接而成。每个环节由驱动机械手运动的带缆电路组成。它还包括提供不同刚度要求的弹簧阻尼系统。在这个例子中展示了一个空间应用,其中机械手的目标是捕获一个小卫星。机械手从折叠状态开始,然后执行必要的机动以扩展和达到所需的位置。滑轮是运动驱动的,必要的皮带-缆索运动学计算。
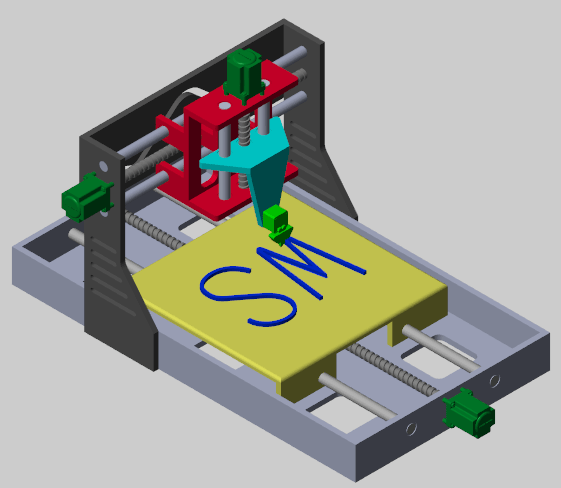
模型笛卡尔3D打印机。该模型允许您在每个轴上指定电机的旋转运动以定义打印路径。在该示例中,使用预定义的旋转运动,打印头沿着两个字母S和M的边缘移动。
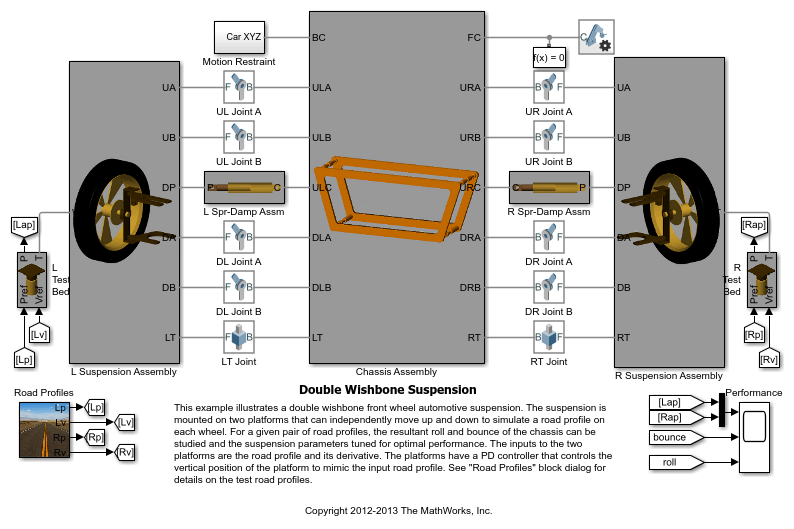
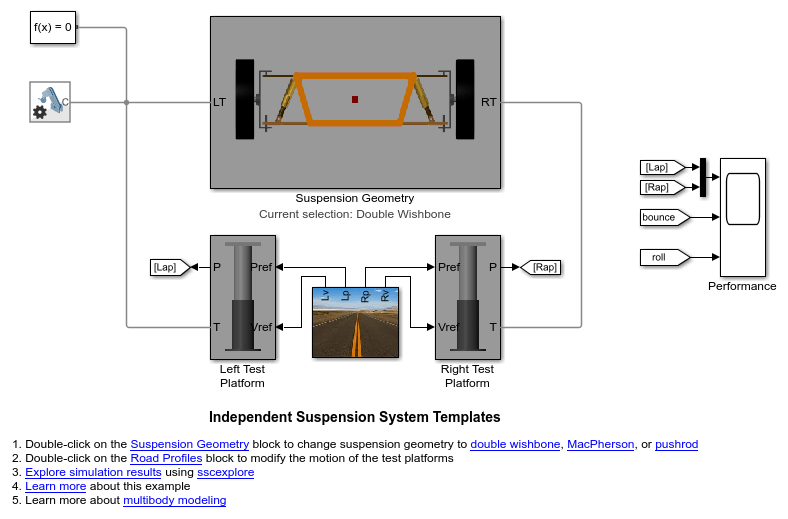
说明了双洋白前轮汽车悬架。悬架安装在两个平台上,可以独立地上下移动以模拟每个轮子上的道路轮廓。对于给定的一对道路型材,可以研究所得到的卷筒和底盘的反弹,并调整悬架参数以获得最佳性能。两个平台的输入是道路轮廓及其衍生物。该平台具有PD控制器,可控制平台的垂直位置以模拟输入路径。有关测试道路配置文件的详细信息,请参阅“道路配置文件生成器”块对话框。
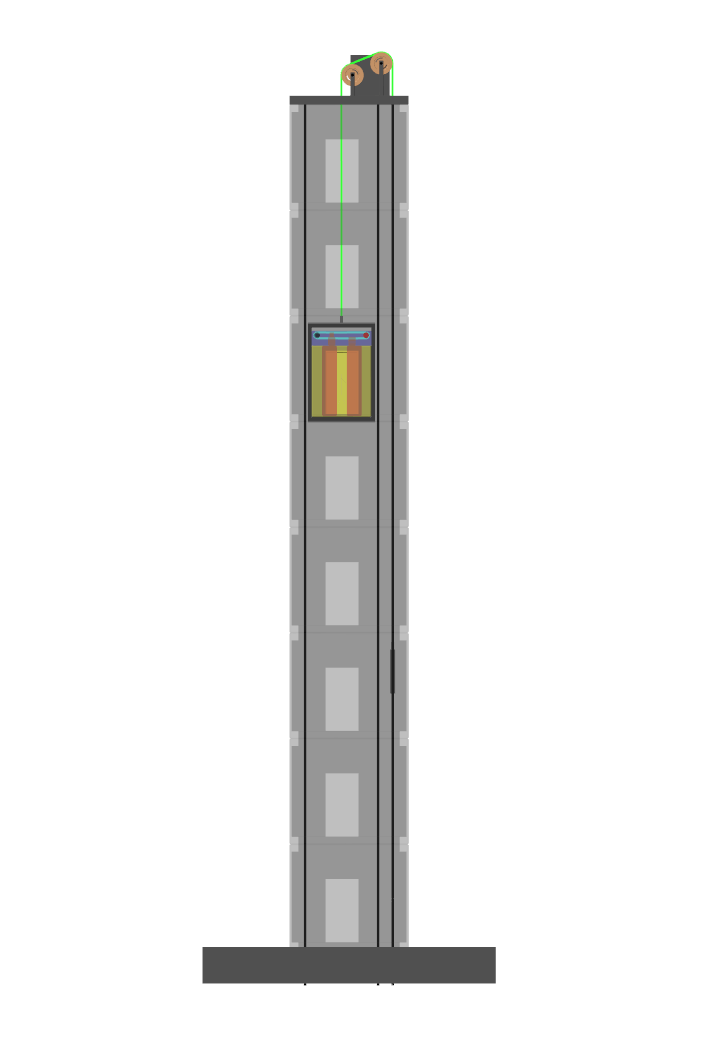
模拟Simsce Multibody™中的电梯系统。该系统包括皮带电缆滑轮电路,其控制电梯和门机构的移动。通过在皮带末端和电梯之间使用高刚度弹簧,电缆近似为可伸缩。电动机滑轮是根据从地板数输入计算的必要电梯运动学致动的运动。使用一般可变质量块建模人们进入和离开电梯的影响。
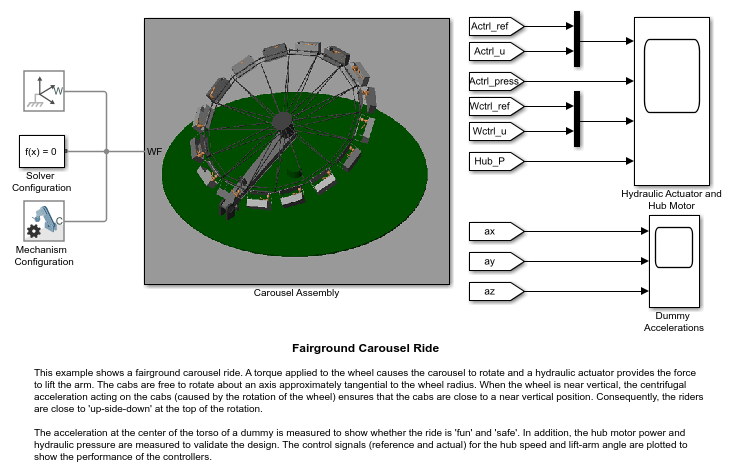
游乐场的旋转木马。施加在轮子上的扭矩使旋转木马旋转,液压执行器提供力来抬起手臂。驾驶室可以自由地绕与车轮半径近似相切的轴旋转。当车轮接近垂直时,作用在驾驶室上的离心加速度(由车轮旋转引起)确保驾驶室接近接近垂直位置。因此,车手在旋转的顶部接近“上下颠倒”。
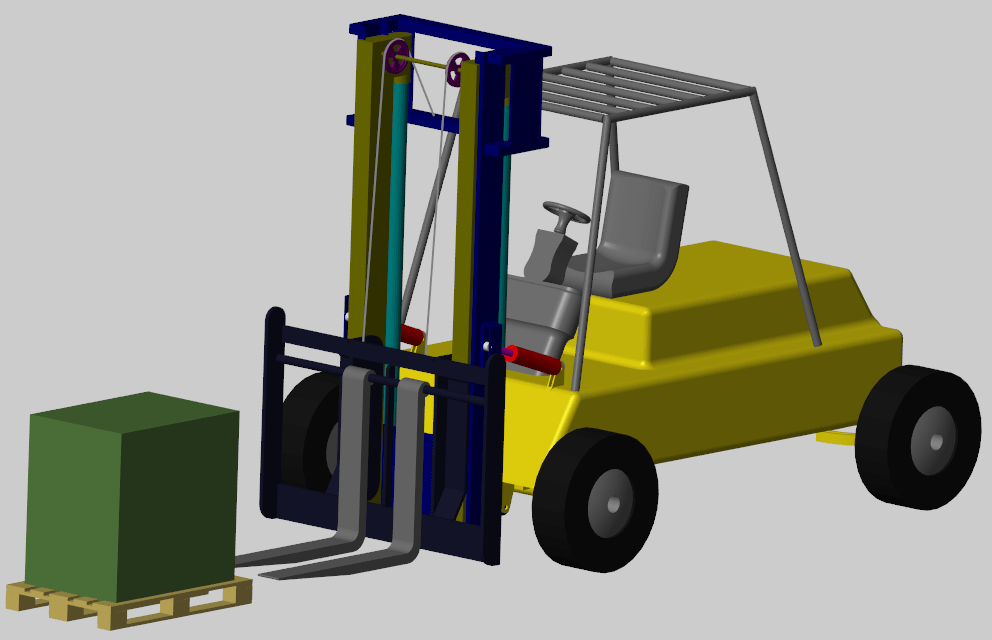
建立了一种使用液压和滑轮机构来执行升降机动作的叉车模型。桅杆的倾斜也由液压缸控制。叉车由三根桅杆组成,即主桅杆、上桅杆和叉桅杆。主桅杆通过转动关节与底盘连接,其倾斜由液压倾斜缸控制。顶桅在主桅上滑动,其运动由液压升降缸控制。叉杆在顶杆上滑动,并通过驱动叉杆运动的皮带电缆电路悬挂。本例中展示了一个常见的仓库应用程序,叉车的目标是抓取一个箱子,通过一个凸起物并将箱子放在架子上。空间接触力块用于所有接触位置来模拟物体之间的接触。用无限平面块对砂轮与地面的接触进行建模,用点块对叉子与盒子的接触进行建模。
在四柱Testrig上模拟乘用车。柱子上下移动以复制车轮的垂直运动,因为它沿着道路行驶。仿真结果和动画显示车身和悬架的响应,因为它受到试验rig的运动。可以观察到车身的卷和间距,并且通过改变输入轮跳频率可以确定。车辆模型可以配置为使用不同的连杆组合使用不同的悬架类型。
包括模板的三种常见类型的汽车独立悬挂系统:双叉骨,麦克弗森,和推杆。悬挂系统上的轮胎安装在可以独立上下移动的平台上。每个平台都有一个PD控制器,允许它模拟所需的道路轮廓。对于给定的一对道路剖面,可以研究合成的滚转和反弹的底盘,并可以调整悬架参数,以获得最佳性能。
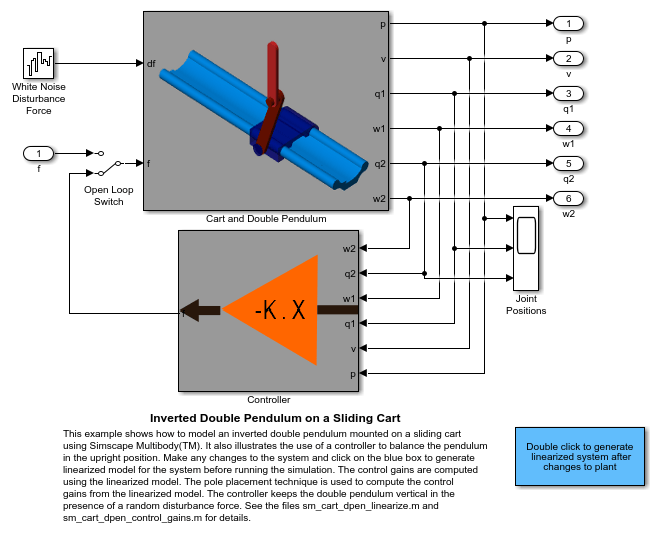
使用Simscape™Multibody™对安装在滑动推车上的倒置双摆进行建模。它还说明了使用控制器来平衡摆在直立位置。对系统进行任何更改,然后单击蓝色框,在运行仿真之前为系统生成线性化模型。利用线性化模型计算控制增益。利用极点配置技术计算线性化模型的控制增益。控制器保持双摆垂直存在随机扰动力。请参阅sm_cart_dpen_linearize文件。m和sm_cart_dpen_control_gains。m详情。
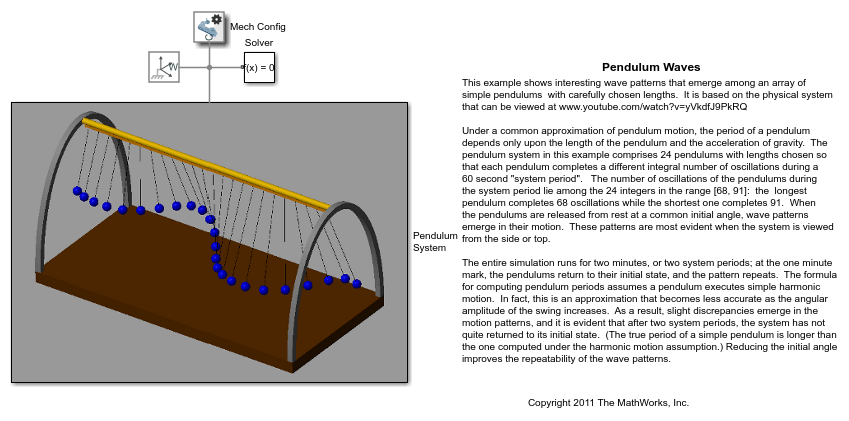
有趣的波模式,其在一系列简单摆在具有精心挑选的长度的阵列中。它基于可以在www.youtube.com/watch?v=yvkdfj9pkrq上查看的物理系统
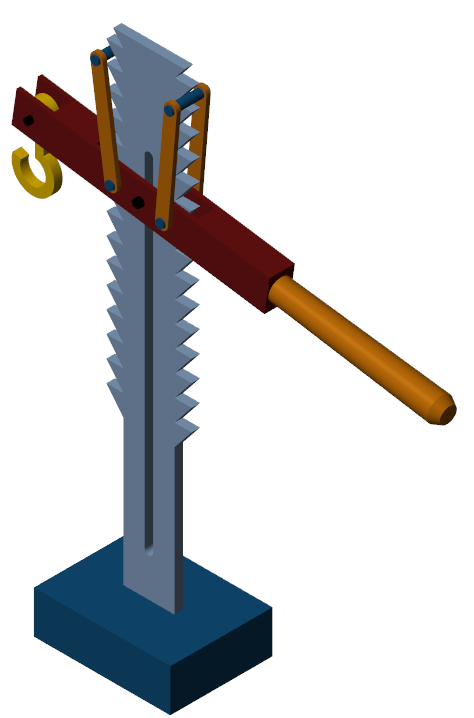
模拟棘轮升降机并演示如何使用涉及复杂几何形状的联系代理。
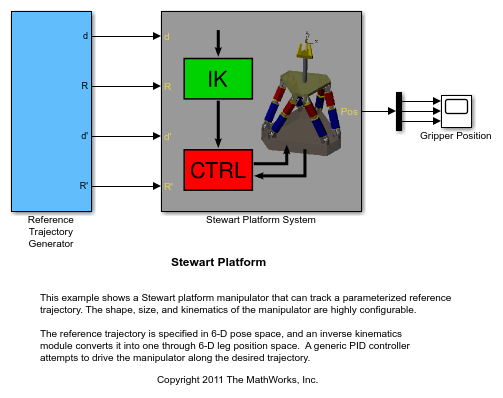
一种可跟踪参数化参考轨迹的Stewart平台机械手。机械手的形状、尺寸和运动学是高度可配置的。
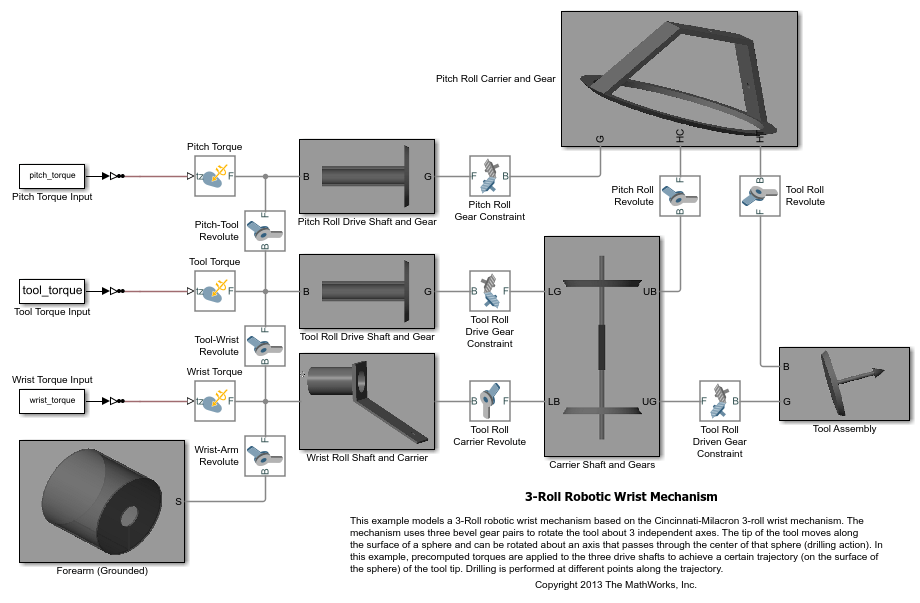
基于Cincinnati-Milacron 3-Roll手腕机构建立了一个3-Roll机器人手腕机构。该机构使用三个锥齿轮副旋转刀具约3个独立轴。工具的尖端沿着一个球体的表面移动,并可以围绕一个穿过球体中心的轴旋转(钻孔动作)。在这个例子中,将预先计算的扭矩应用到三个传动轴上,以实现刀尖的特定轨迹(在球面上)。在沿轨迹的不同位置进行钻井。
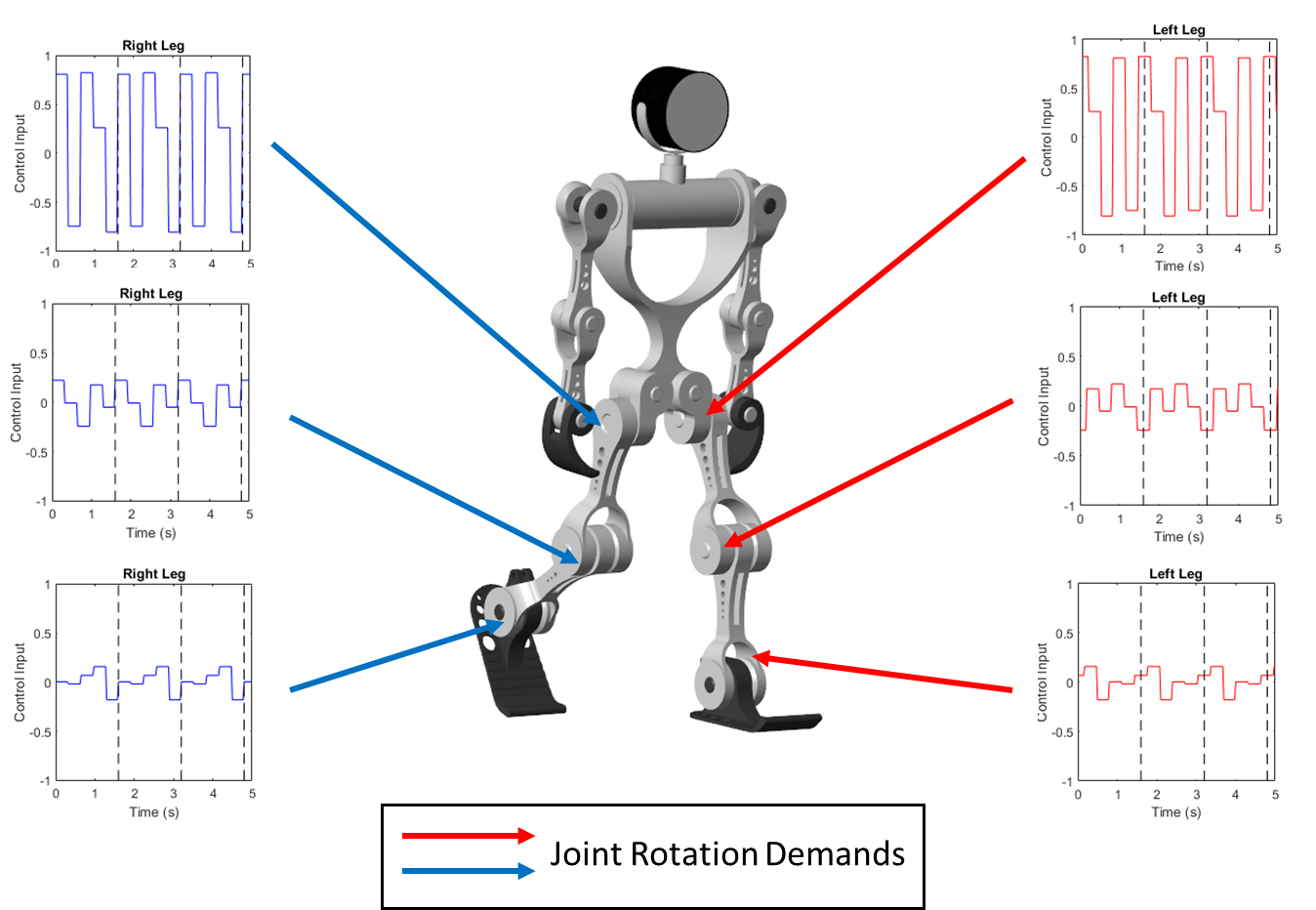
使用Simscape Multibody™模型,使用Simscape Multibody™和使用遗传算法(这需要全局优化工具箱许可证)或强化学习(这需要深入学习工具箱™和强化学习工具箱™许可)进行培训。
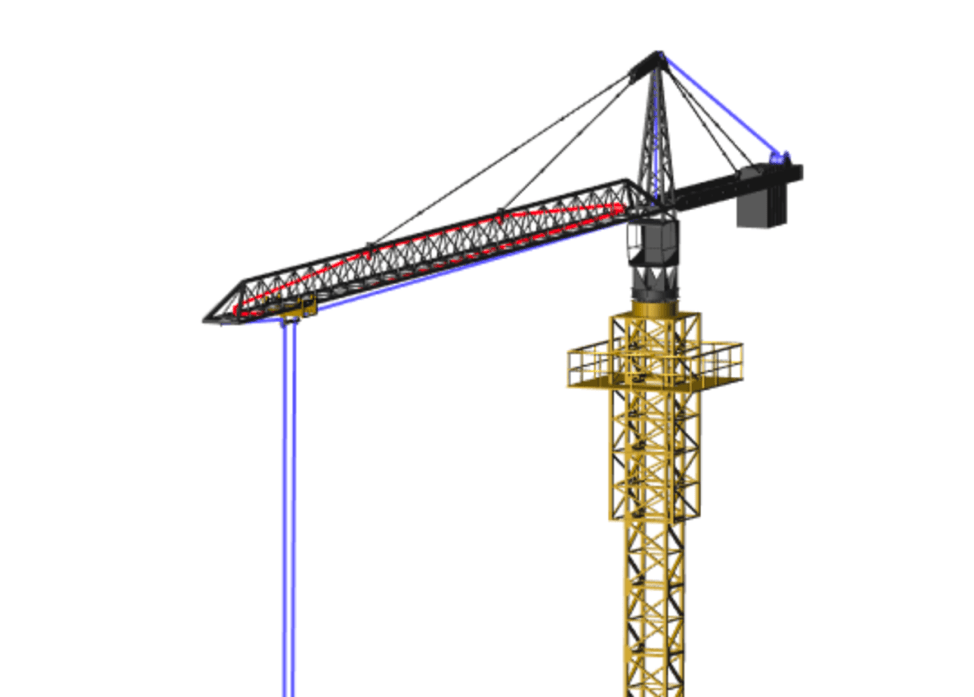
模型的塔式起重机与小车和升降机。提升机可以提升或降低负载,小车将负载向塔的方向或向塔的方向移动。来自传送带和电缆库的块被用来模拟控制提升负载和移动小车的滑轮。
您单击了与此MATLAB命令对应的链接:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:.
您还可以从以下列表中选择一个网站:
选择中国网站(以中文或英文)以获取最佳网站性能。其他MathWorks国家网站未优化您的位置。
与当地办事处联系