主要内容
differentialDriveKinematics
差动式驱动车辆模型
描述
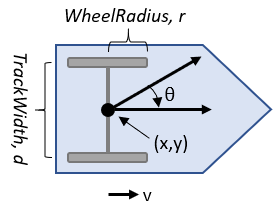
differentialDriveKinematics创建一个差动驱动车辆模型来模拟简化的车辆动力学。这个模型近似一辆车辆有一个固定的轴和车轮,由指定的轨道宽度分开。车轮可以独立驱动。车辆的速度和方向是从车轴中心定义的。车辆的状态被定义为一个三元素矢量,(x yθ),具有全球xy-位置,以米为单位,以及车辆的航向,θ,以弧度表示。要计算模型的时间导数状态,使用导数功能与输入命令和当前的机器人状态。
创建
描述
kinematicModel= differentialDriveKinematics
kinematicModel= differentialDriveKinematics(名称,值)
属性
对象的功能
导数 |
车辆状态的时间导数 |
例子
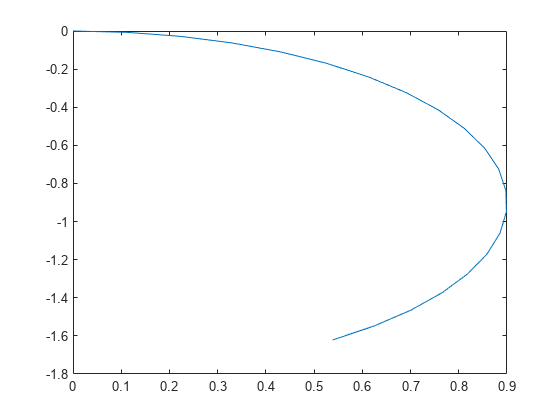
差动驱动运动机器人路径绘制
参考文献
林奇、凯文·M和弗兰克·c·帕克。现代机器人技术:机械、计划和控制第1版,马萨诸塞州剑桥:剑桥大学出版社,2017。
扩展功能
另请参阅
类
块
功能
介绍了R2019b
你也可以从以下列表中选择一个网站: