中心
模型从规范化coprime分解还原
描述
中心计算模型的降维近似通过删除模式coprime分解的全阶模型。这种方法的平衡截断方法有关balred,但它是特别适合于控制器降阶。稳定控制器,控制器也减少稳定只要近似误差小于利润计算的健壮性ncfmargin。
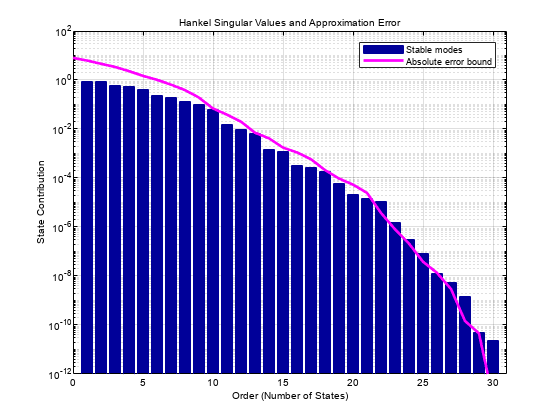
中心(G)情节汉克尔奇异值和每个订单对应的近似误差界限。检查图来确定减少基于理想的忠诚或鲁棒稳定性问题。然后,您可以使用gre =中心(G,奥德)计算降维模型。
例子
减少模型的顺序
中心计算汉克尔奇异值和近似错误来帮助你选择一个合适的目标减少订单。这样做的方法之一是检查这些值的阴谋。负载比如说工厂模型G。
负载(“ncfmrModel.mat”,“G”)大小(G)
2输出,状态空间模型3输入,和30个州。
调用中心没有一个输出参数。生成一个汉克尔函数奇异值图,显示了每个州的相对能量贡献的coprime分解G降序排列的能量。情节也显示了原始误差的上界和降维模型获得通过删除状态。检查该地块选择目标。例如,对于最大误差为0.01,可以减少模型13秩序。
中心(G)
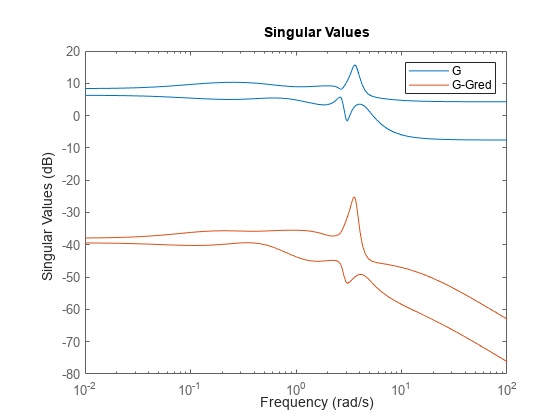
调用中心又一个输出参数,使用订单= 13。这样做计算简化模型gre考试。检查的奇异值G和之间的区别G和gre考试。区别非常小在所有频率,显示完整的订单的降维模型是一个很好的近似模型。
gre =中心(G, 13);σ(G, G-Gred)传说(“G”,“G-Gred”)
减少控制器顺序在保持稳定和鲁棒性
当你使用中心减少植物G或控制器K的闭环响应反馈(G * K,眼(n))是稳定的,由此产生的闭环响应也是稳定的,只要减少模型的近似误差不超过保证金计算的健壮性ncfmargin。看到这个的好处中心,加载一个植物G和设计一个控制器。对于这个示例,使用ncfsyn设计控制器。
负载ncfmrStability.matG大小(G)
1输出,状态空间模型1输入,和3。
%制定权重s =特遣部队(“年代”);特遣部队(W1 = 3.35 * 20.89 [1], [1 0]);W2 = 1;%控制器[K, ~, ~, Kinfo] = ncfsyn (G, W1 W2);大小(K)
1输出,状态空间模型1输入,和5个州。
ncfsyn通过优化设计一个控制器ncfmargin鲁棒性使用植物的权重函数W1和W2(见ncfsyn)。分析利润与ncfmargin和减少控制器命令中心,使用的植物Gs和控制器Ks为它设计的。
Gs = Kinfo.Gs;Ks = Kinfo.Ks;
使用ncfmargin找到的健壮性边缘系统全阶控制器。ncfsyn假设一个积极的反馈回路ncfmargin采用负反馈,所以反向控制器的信号计算。
emax = ncfmargin (Gs - k)
emax = 0.1956
只要降维控制器的近似误差不超过emax,保留了闭环系统的稳定性。假设你可以容忍这减少50%保证金,以换取低阶控制器计算的好处。选择减少订单,首先计算每个目标相关的错误。中心返回这些值ErrorBound场的信息论点。然后找到最后一个条目的指数info.ErrorBound超过目标的错误emax / 2。
[~,信息]=中心(Ks);r =找到(info.ErrorBound > emax / 2, 1,“最后一次”)
r = 3
因此,您可以近似原控制器只有三个州没有太多失去稳定性。避免汉克尔奇异值的验算Ks,使用信息作为输入参数中心。
Ksr =中心(Ks, r,信息);大小(Ksr)
1输出,状态空间模型1输入,和3。
降维控制器产生一个非常相似的稳定裕度原控制器。
-Ksr ncfmargin (Gs)
ans = 0.1949
进一步降低控制器顺序会导致额外的稳定裕度降低。减少太多会导致损失的闭环稳定性。例如,尽量降低一阶。
Ksru =中心(Ks 1信息);-Ksru ncfmargin (Gs)
ans = 0
因此,对于进一步分析或实现,使用三阶控制器。为此,转换Ksr,减少了控制器Gs,进入基米-雷克南,减少了控制器G。
基米-雷克南= W1 * Ksr * W2;
确认这个控制器是满意的,比较全阶控制器的闭环响应的响应。再次,反向控制器占的符号ncfsyn假设积极的反馈。
CL =反馈(K - g *, 1);CLr =反馈(g * Kr, 1);步骤(CL, CLr)传奇
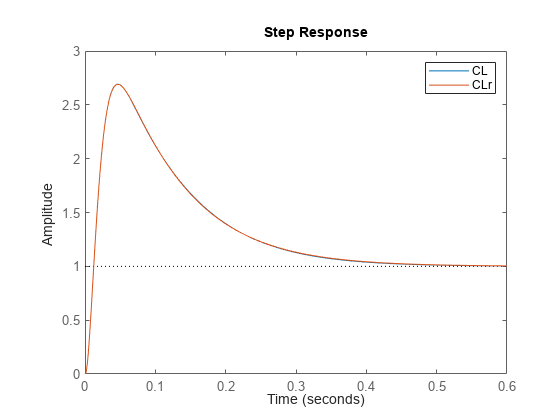
大超调在这种情况下是由于不稳定的原植物G。
计算多个降维模型
中心可以计算多个降维模型并返回数组模型。这可能是有用的,例如,当您想要测试控制器设计与多个近似选择收益率之间的最佳平衡的精度和计算效率。计算多个模型,提供一个向量的目标减少订单,而不是一个单一的值订单。
负载比如说工厂模型G。11−15的订单计算五个近似。
负载(“ncfmrModel.mat”,“G”)订单= 11:15;gre =中心(G,订单);大小(gre)
5 x1的状态空间模型。每个模型有两个输出,3输入,和11至15个州。
gre考试降维状态空间是一个数组(党卫军)模型。您可以使用SamplingGrid的属性党卫军把数组中的每个条目和相应的模型。
gre。SamplingGrid =结构(“秩序”、订单);
分配SamplingGrid可以用于跟踪模型中的条目数组中。例如,如果您的频率响应gre考试在MATLAB®图,单击一个结果创建一个工具提示,包括来自信息的反应SamplingGrid。
输入参数
输出参数
提示
您可以使用
中心减少工厂G或控制器K同时保留以下输出或MIMO反馈回路的闭环稳定性。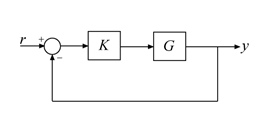
这个循环的稳定性得以保留,只要减少植物的近似误差小于这个循环由鲁棒性优势
ncfmargin (G、K)。的控制器计算
ncfsyn,减少了控制器K年代那ncfsyn计算形状的控制器G年代是更可取的。这两个K年代和G年代返回的是ncfsyn在信息输出参数。你可以计算Kr原始的植物,减少控制器G,从Kr=W1K老W2,在那里W1和W2塑造重量使用吗ncfsyn。例如,看到的减少控制器顺序在保持稳定和鲁棒性。控制器通过其他技术,减少
中心也能保持稳定,如果误差不超过ncfmargin保证金。然而,这样可以减少部分消除积分作用,引入稳态跟踪误差。因此,消除任何积分器从控制器在减少中心建议,减少控制器取而代之。

算法
中心执行以下步骤来减少输入模型G理想的秩序k。