基于模拟I/O数据的电力电子模型控制器设计
这个例子展示了如何在Simulink中设计电力电子系统的PID控制器金宝app®使用Simscape™电气™组件。
许多电力电子系统不能线性化,因为它们使用高频开关元件,如脉宽调制(PWM)发生器。然而,大多数金宝appSimulink控制设计™PID整定工具设计基于线性化的植物模型的PID增益。为了获得不能线性化的电力电子模型的这样一个模型,可以:
使用系统辨识工具箱估计设备线性模型的参数™ 如本例所示的软件。
估计一个频率范围内的植物频率响应。例如,请参见基于频率响应数据的电力电子模型控制器设计.
提高转炉模型
本例使用升压变换器模型作为电力电子系统的实例。升压变换器电路通过控制斩波或开关源电压,将一种直流电压转换为另一种,通常是更高的直流电压。
mdl =“scdboostconverter”; 开放式系统(mdl)
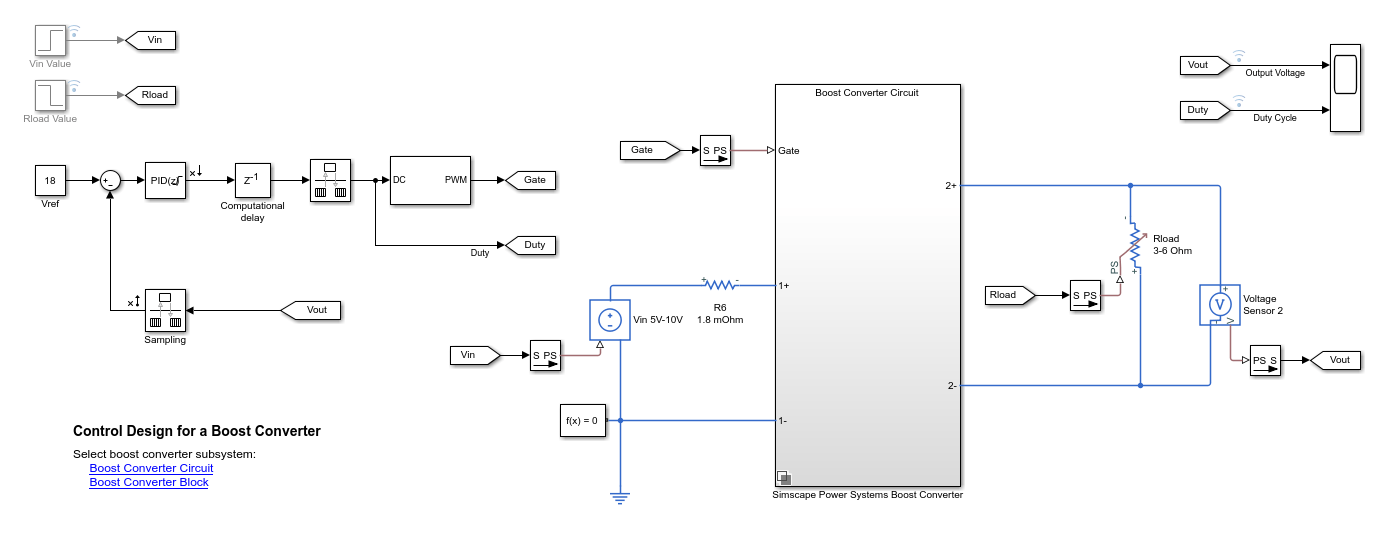
在这个模型中,一个由脉宽调制(PWM)信号驱动的MOSFET用于开关。输出电压Vout应以参考值规范吗Vref.数字PID控制器调节PWM占空比,责任,基于电压误差信号。对于这个例子,你估计一个从PWM占空比到负载电压的线性模型Vout.
Simscape电软件包含许多电力电子系统的预定义模块。该模型包含一个变型子系统,带有升压变换器模型的两个版本:
升压变换器电路构造使用电力元件。电路元件的参数是基于[1].
升压转换器模块配置为具有与升压转换器电路相同的参数。有关此区块的更多信息,请参见提高转换器(Simscape电气).
寻找模型工作点
要为升压转换器设计控制器,必须首先确定希望转换器工作的稳态工作点。有关查找操作点的更多信息,请参阅查找Simscape模型的稳态工作点. 对于本例,使用从模拟快照估计的工作点。
要找到操作点,使用模型线性化器.打开模型线性化器,在Simulin金宝appk模型窗口中应用程序图库,单击模型线性化器.
在模型线性化器,在线性分析选项卡,在操作点下拉列表中,选择采取模拟快照.
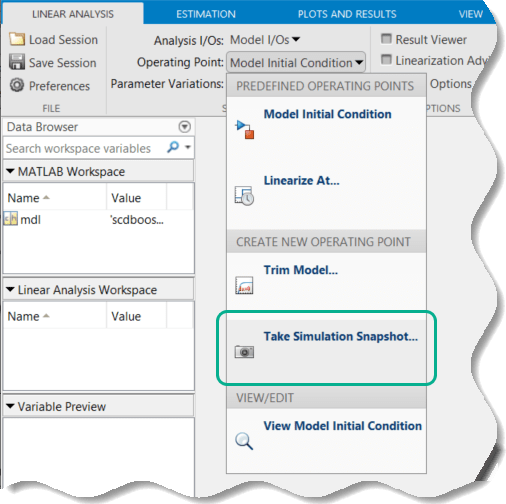
在“输入要线性化的快照时间”对话框中模拟快照时间字段中,输入0.045,有足够的时间使闭环系统达到稳态。

点击采取快照.
软件模拟模型并创建一个工作点,该工作点包含在指定的快照时间内模型的输入和状态值。这个操作点,op_snapshot1,被添加到线性分析工作区.
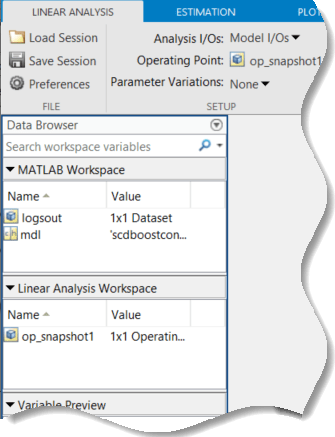
要使用计算的操作点初始化模型,双击op_snapshot1.
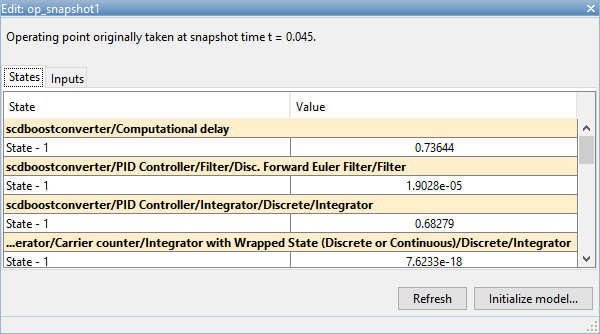
在“编辑”对话框中,单击初始化模型.

在初始化模型对话框中,选择MATLAB工作空间,然后单击好吧.该软件将工作点输出到MATLAB®使用工作点中的输入和状态初始化模型。
指定控制器的结构
在调整PID控制器块之前,使用PID调谐器,则必须指定控制器结构。为此,双击控制器块。然后,指定以下控制器参数:
控制器
形式
时间域
离散时间设置
其他设置,如控制器初始条件、输出饱和水平和抗饱和配置。
对于本例,使用当前控制器配置;即不带反上环的离散时间并联PID控制器。
使用PID调谐器,可以调整以下控制器块的参数:
如果你的模型使用Simscape电离散PI控制器(Simscape电气)块或带积分抗饱和的离散PI控制器(Simscape电气)块,必须将此块替换为离散PID控制器块之前调优。
确定植物模型
打开PID调谐器点击调优.当PID调谐器首先打开,它尝试线性化模型。由于PWM元件,模型解析线性化为零。
为了获得线性植物模型,在PID调谐器选项卡上,单击植物,然后在创造一种新的植物点击确定新工厂.
为了识别一个植物模型,首先通过模拟你的模型获得输入/输出数据。在植物鉴别选项卡上,单击获取I/O数据>模拟数据.对于植物标识,您必须为Simulink模型停止时间指定一个有限值。金宝app
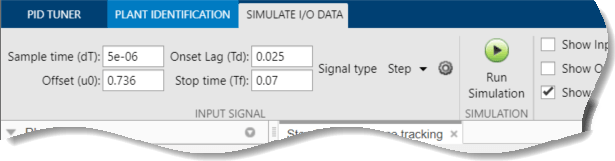
在模拟I / O数据选项卡,用下列设置配置输入信号。
信号类型的
一步.样品时间的
5e-06.出现滞后的
0.025,这是电厂达到稳定状态的足够时间。停止时间的
0.07,有足够的时间使设备输出在步进输入后恢复到稳定状态。抵消的
0.736的值PID控制器块输出在计算的工作点。对于这个模型,偏移量对应于计算延迟块如果模型中没有这样的对应状态,则可以将作用域附加到PID控制器块的输出,并在计算的工作点模拟模型。
要指定步长幅度,请单击![]() 。然后,在“步骤输入规范”对话框中振幅字段,类型
。然后,在“步骤输入规范”对话框中振幅字段,类型0.01.这个值大到足以激发系统,小到足以防止控制器进入断续电流模式。
点击运行模拟.为了获得植物的输入/输出响应,PID调谐器在输出端注入指定的输入信号PID控制器阻塞并测量控制器输入端的相应输出响应。该软件运行两个模拟,一个是没有输入信号的偏移响应,一个是有输入信号的输入响应。这些响应之间的区别是输出响应。
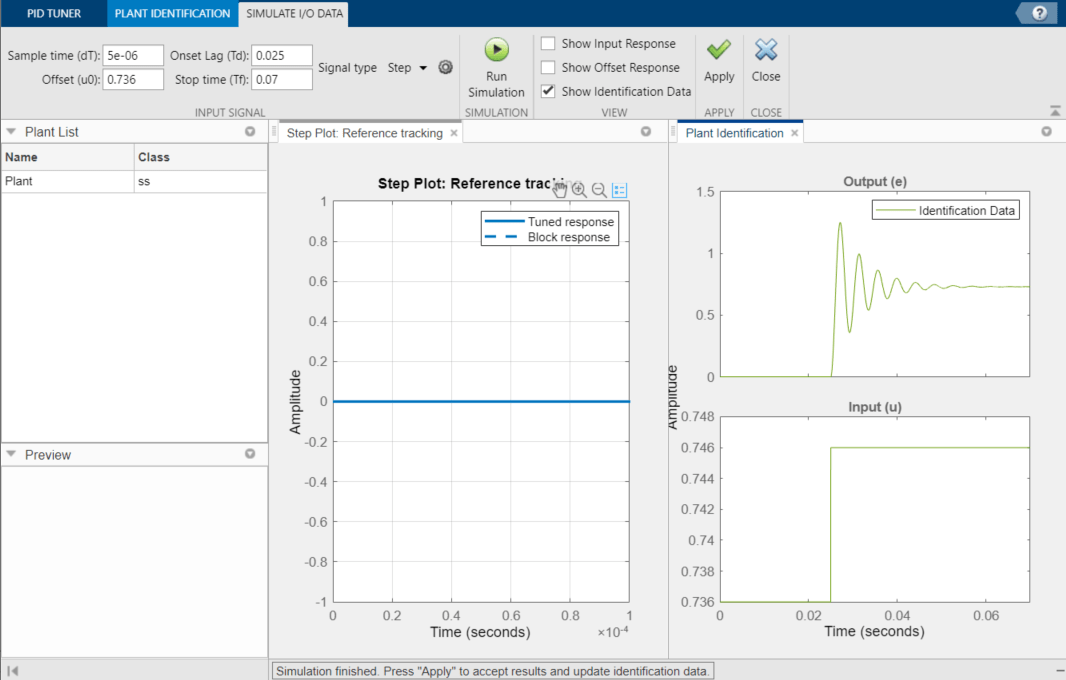
在植物鉴别文档中,输入曲线图显示指定的输入信号,以及输出该图显示了相应的输出响应。
要使用这个模拟的输入/输出数据,请单击应用.然后,关闭模拟I / O数据选项卡上,单击关闭.
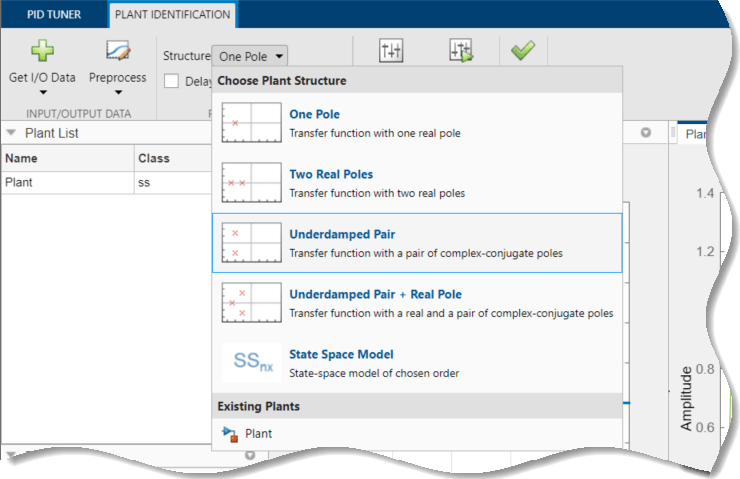
在植物鉴别选项卡,根据您对设备的了解和输出阶跃响应的外观,选择要识别的设备结构。对于本例,输出响应看起来像欠阻尼二阶响应。在结构下拉列表中,选择欠阻尼的一对.
要获得已识别植物的粗略近似值,请在确定植物结构绘制、拖动对应于阶跃响应包络线的虚线。调整响应,使其接近输出响应。
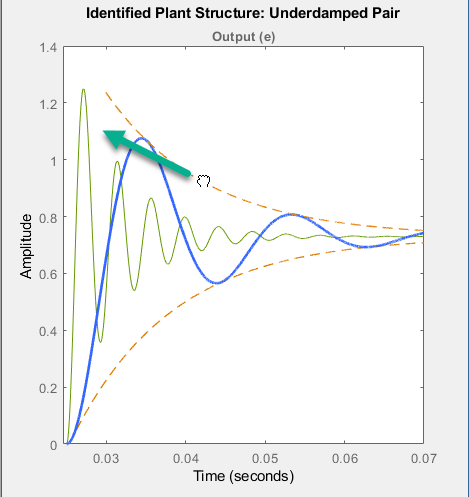
要微调近似响应,请单击自动估计. 软件使用当前参数作为初始猜测来估计已识别电厂模型的参数。
“工厂识别进度”对话框显示估计过程的结果。在本例中,与估计数据的拟合度大于98%。若要使用此已识别的工厂,请在植物鉴别选项卡上,单击应用.
的PID调谐器更新其辨识的对象模型,选择控制器参数以满足系统的整定要求调优工具段,并绘制该控制器的调谐响应。扩大情节,关闭情节植物鉴别文档。
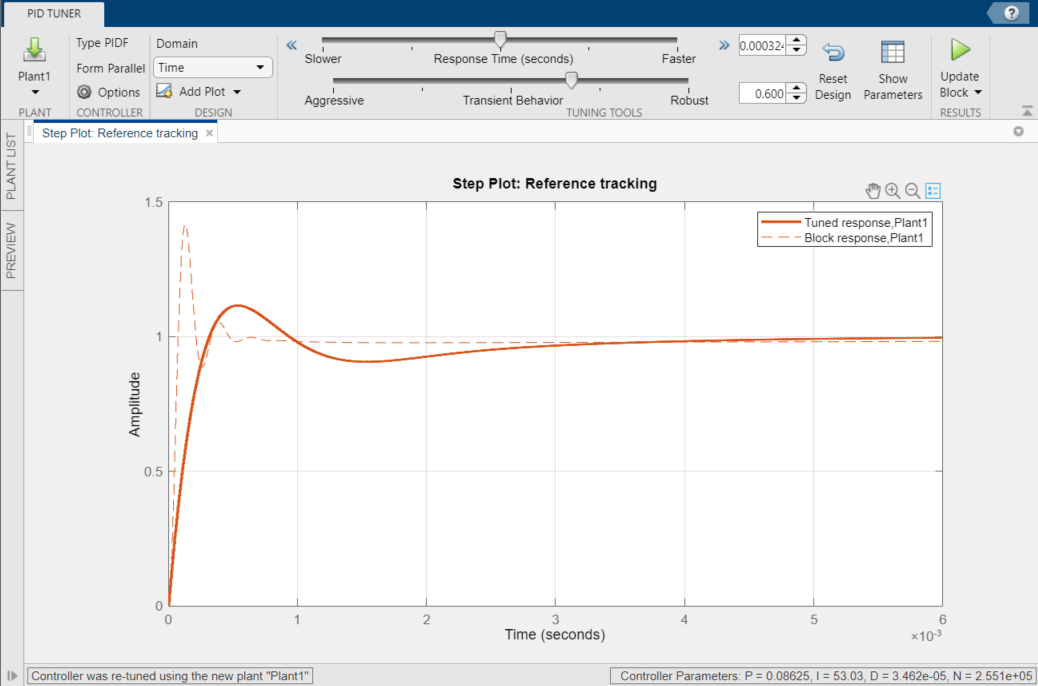
阶跃响应显示块响应(虚线)和调谐响应(实线)。块响应对应于中的当前PID增益PID控制器块调谐响应对应于中的调谐PID增益PID调谐器.
优化控制器
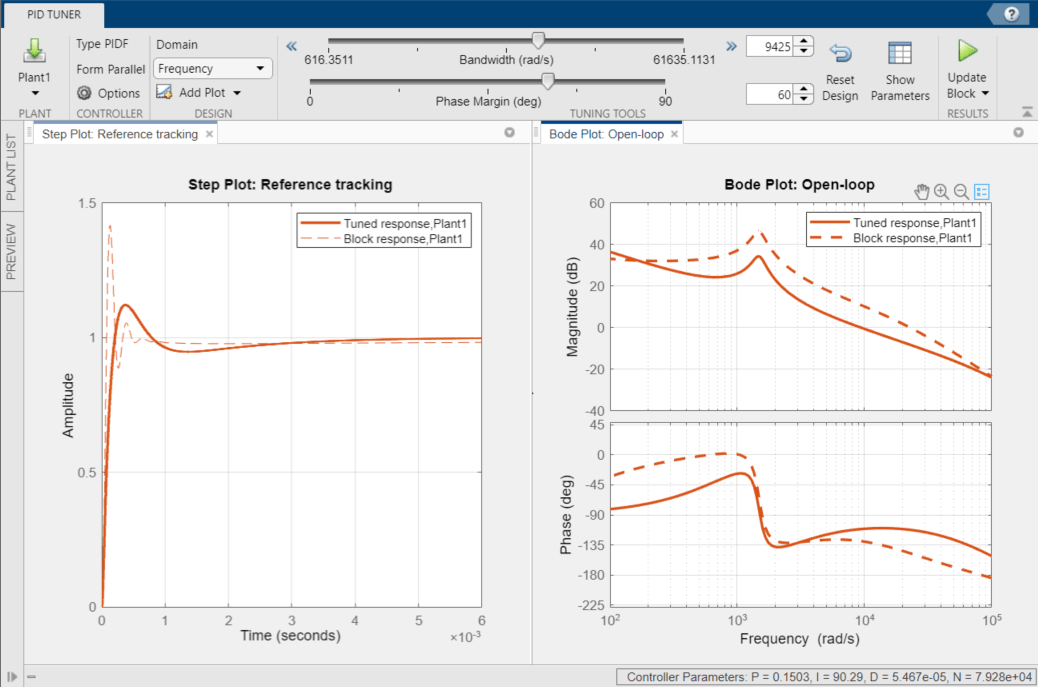
要根据带宽和相位裕度调整控制器,请在PID调谐器选项卡,在域下拉列表中,选择频率.
对于本例,设置带宽和阶段保证金来9425rad/s (1.5 kHz)和60,分别根据中规定的设计准则[1].
PID调谐器选择满足这些设计规格的控制器参数。
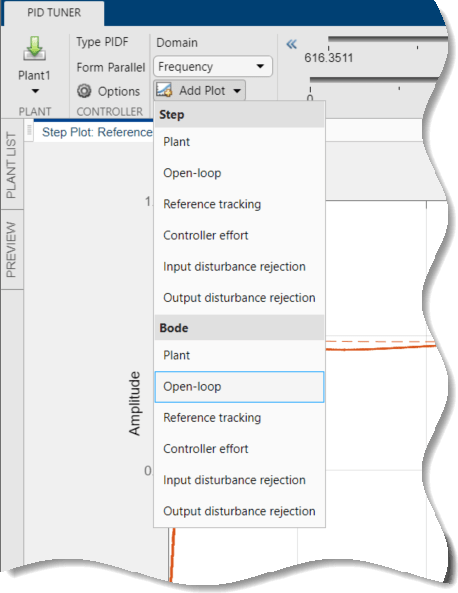
要查看调谐系统的频率响应,请单击添加图,在预兆点击开环.
要调整Bode绘图的限制,请在绘图区域上单击鼠标右键,然后选择属性。然后,在“属性编辑器”对话框中的限制选项卡,设置轴限制。
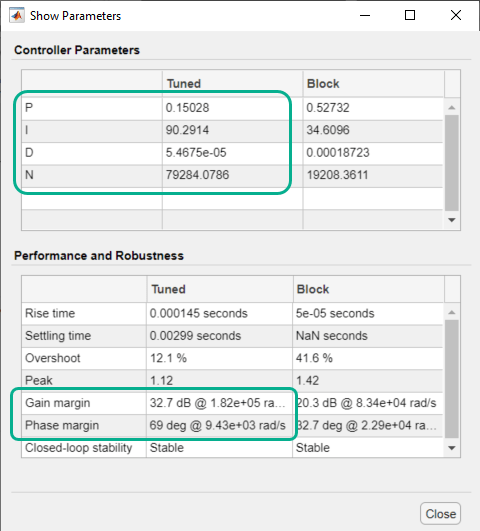
要查看调整后的控制器参数和性能指标,包括增益和相位裕度,单击显示参数.在9425 rad/s时,调谐结果有366 dB增益裕度和69 deg相位裕度。
更新PID控制器块与调谐增益,在PID调谐器选项卡上,单击更新块.
验证控制器
您可以使用带有线路和负载扰动的仿真来检查调谐控制器的性能。为了检验控制器的动态性能,Simulink模型使用了以下扰动:金宝app
t=0.075秒时的线路干扰,增加了输入电压,文,从5V到10V
t = 0.1秒时的负载扰动,增加了负载电阻,Rload,从3欧姆到6欧姆
模拟模型。
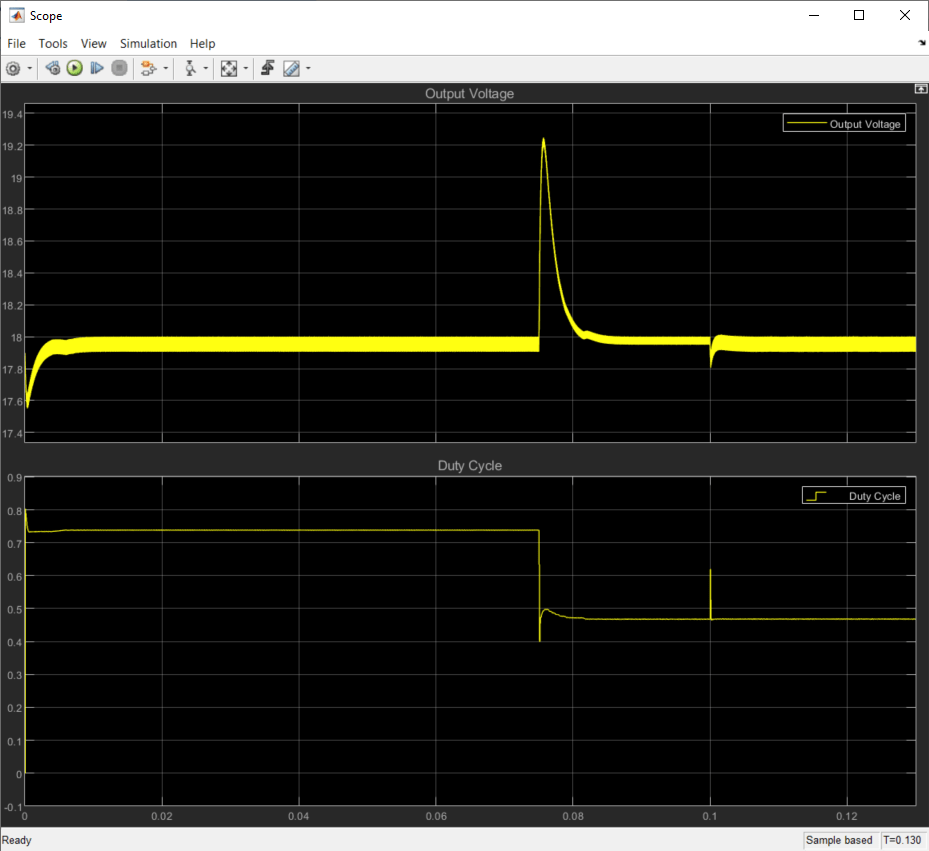
该控制器能很好地抑制线路和负载扰动。
参考文献
[1]李,S. W。电压型升压变换器的实用反馈回路分析。申请报告。SLVA057。德州仪器。2014年1月。www.ti.com/lit/an/slva633/slva633.pdf
另请参阅
相关的话题
您还可以从以下列表中选择网站: