PCSEGDIST.
基于欧几里得距离将点云分割成簇
描述
例子
基于欧氏距离的聚类点云
创建两个同心球体,并将它们组合成点云。
[x,y,z] =球体(100);loc1 = [x(:),y(:),z(:)];LOC2 = 2 * LOC1;ptcloud = pointcloud([loc1; loc2]);PCSHOW(PTCLOUD)标题(“点云”)
设置集群之间的最小欧氏距离。
minDistance = 0.5;
分割点云。
[标签,numClusters] = pcsegdist (ptCloud minDistance);
绘制标记的结果。这些点被分成两组。
pcshow (ptCloud.Location、标签)colormap (hsv (numClusters))标题(“点云集群”)

基于欧几里德距离的集群激光乐节云
加载一个有组织的激光雷达点云ptCloud.
负载(“drivingLidarPoints.mat”) pcshow (ptCloud)标题(“未聚集的点云”)
检测接地面并存储点内围层.距离的单位是米。
maxDistance = 0.3;referenceVector = [0, 0, 1];[~,内围层,离群值]= pcfitplane (ptCloud, maxDistance referenceVector);
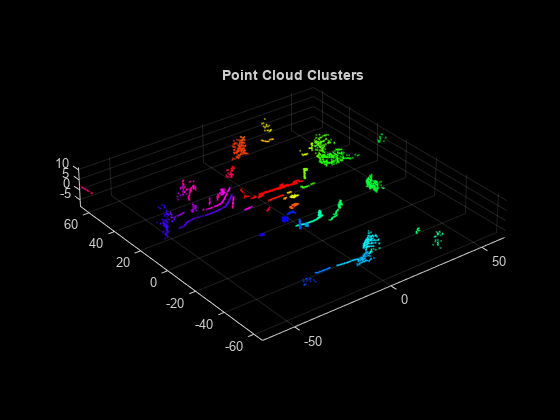
聚集点,忽略地面平面点。在簇之间指定最小欧几里德距离为0.5米。
ptcloudwithoutground = select(ptcloud,异常值,“OutputSize”,'满的');Distthreshold = 0.5;[标签,numflusters] = pcsegdist(ptcloudwithoutground,distthreshold);
请为接地点添加附加标签。
numClusters = numClusters + 1;标签(窗)= numClusters;
绘制标记的结果。接地面以黑色显示。
LabelColorIndex =标签+ 1;pcshow(ptcloud.location,labelcolorIndex)Colormap([HSV(Numflusters); [0 0 0]])标题(“点云集群”)

输入参数
输出参数
扩展功能
介绍了R2018a
你也可以从以下列表中选择一个网站:
