segmentGroundFromLidarData
从组织好的激光雷达数据中分割出地面点
语法
描述
groundPtsIdx= segmentGroundFromLidarData (ptCloud)ptCloud,分为地面和非地面部分。激光雷达传感器必须水平安装,以便在激光雷达扫描中观察到离传感器最近的所有地面点。
groundPtsIdx= segmentGroundFromLidarData (ptCloud,名称,值)segmentGroundFromLidarData (ptCloud ElevationAngleDelta的5)
例子
分段和标绘组织了激光雷达数据
从一个有组织的激光雷达点云中分割地面点和非地面点。从这些分割创建有组织的点云,并显示它们。
加载一个有组织的激光雷达,点云。
ld =负载(“drivingLidarPoints.mat”);
从组织好的激光雷达点云中分割出地面点。
groundPtsIdx = segmentGroundFromLidarData (ld.ptCloud);
方法创建只包含这些地面点的有组织的点云选择函数。显示这个点云。
groundPtCloud =选择(ld.ptCloud groundPtsIdx);图pcshow (groundPtCloud)
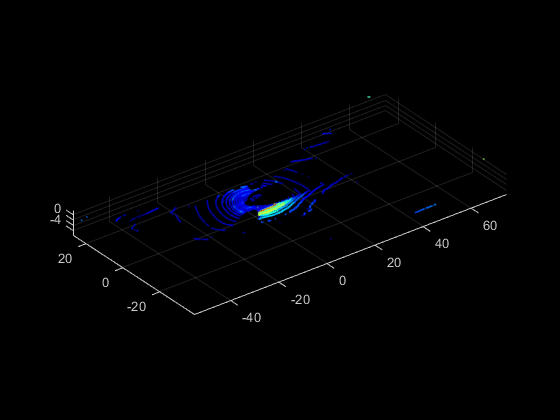
创建一个只包含非地面点的有组织的点云。指定0.5米的阈值。
nonGroundPtCloud =选择(ld.ptCloud ~ groundPtsIdx,“OutputSize”,“全部”);distThreshold = 0.5;[标签,numClusters] = segmentLidarData (nonGroundPtCloud distThreshold);
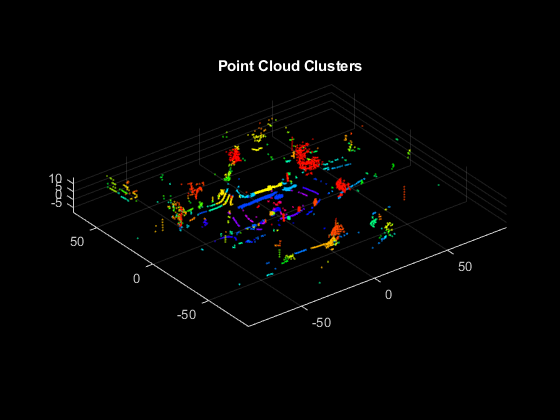
显示非地面点云团。
figure colormap(hsv(numClusters)) pcshow(nonGroundPtCloud.Location, tags)“点云集群”)
使用PCAP文件分割和绘制地平面
将Velodyne PCAP®加载到工作空间。
velodyneFileReaderObj = velodyneFileReader (“lidarData_ConstructionRoad.pcap”,“HDL32E”);
使用pcplayer创建点云播放器。定义它的x- - - - - -,y- - - - - -,z-轴的极限,以米为单位,并标记它的轴。
xlimits = [- 4040];ylimits = [-15];zlimits = [-3];球员= pcplayer (xlimits ylimits zlimits);
标记pcplayer坐标轴。
包含(player.Axes“X (m)”)ylabel (player.Axes“Y (m)”)zlabel (player.Axes“Z (m)”)
设置标记点的颜色映射。使用RGB三联图指定地面点为绿色,障碍点为红色。
颜色= [0 1 0;1 0 0];greenIdx = 1;redIdx = 2;
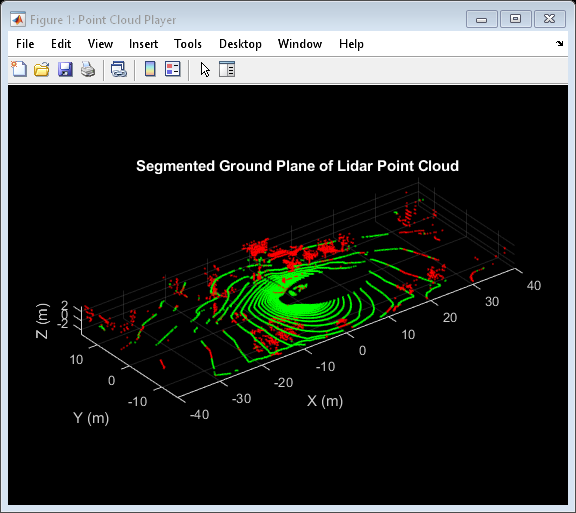
使用以下命令遍历Velodyne PCAP文件中的前200个点云readFrame读取数据。从每个点云分割地面点。将所有地面点涂成绿色,非地面点涂成红色。绘制由此产生的激光雷达点云。
colormap (player.Axes、颜色)标题(player.Axes,“激光雷达点云分段地平面”);为i = 1: 200读取当前帧。ptCloud = velodyneFileReaderObj.readFrame(我);创建标签数组。colorLabels = 0(大小(ptCloud.Location, 1),大小(ptCloud.Location 2));找到地面点。groundPtsIdx = segmentGroundFromLidarData (ptCloud);地图颜色地面指向绿色。colorlabel (groundPtsIdx (:)) = greenIdx;将非地面点的颜色映射为红色。colorlabel (~groundPtsIdx (:)) = redIdx;%绘制结果。视图(球员,ptCloud.Location colorLabels)结束
输入参数
输出参数
参考文献
Bogoslavskyi, I. "有效的在线分割稀疏三维激光扫描"。摄影测量、遥感和地球信息科学杂志。第85卷,2017年第1期,第41-52页。
扩展功能
介绍了R2018b
你也可以从以下列表中选择一个网站:
