标签应用商店如何导出像素标签
控件中创建和导出像素标签时图片标志,贴标签机视频,或地面实况贴标签机(自动驾驶工具箱)(需要自动化驾驶工具箱™)应用程序,保存两组数据。
一个文件夹命名
PixelLabelData,其中包含像素标签信息的PNG文件。这些标签被编码为索引值。一种包含像素标签数据以及任何其他标签数据的mat文件。这些数据存储在
地面对象,或者地面实况贴标签机应用程序,groundTruthMultisignal(自动驾驶工具箱)对象。对于像素标签数据,对象还存储图像或视频帧与PNG文件之间的对应关系。
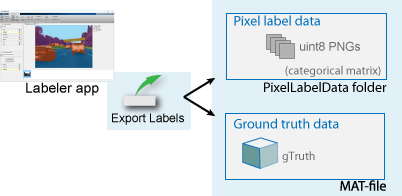
在...中的PNG文件PixelLabelData文件夹存储为分类矩阵。的分类矩阵包含分配给类别的值。分类是数据类型。分类矩阵提供有效的存储,方便地操作非数字数据,同时也为值维护有意义的名称。这些矩阵是用于语义分割的自然表示,其中每个像素是预定义类别的标签之一。
像素标签数据文件夹的位置
ground truth对象存储像素标签数据文件夹的文件夹路径和名称。的Labeldata.财产的财产地面对象或roilabeldata.财产的财产groundTruthMultisignal对象中的信息“PixelLabelData”柱子。如果更改像素数据文件的位置,则还必须更新地面真实对象中的相关信息。你可以使用changeFilePaths函数更新信息。
查看导出的像素标签数据
标签应用程序存储的语义分割地面真相作为无损PNG文件,与uint8表示每个类别的值。该应用程序使用分类函数来关联uint8值为一个类别。要查看像素数据,您可以覆盖图像上的类别或从标记图像创建数据存储。
通过在图像上叠加类别查看导出的像素标签数据
使用Imread.用来的功能分类和labeloverlay职能。您无法直接从分类矩阵查看像素数据。看到查看导出的像素标签数据.
查看从已标记图像的数据存储导出的像素标签数据
使用PixellabeldAtastore.函数从一组标记的图像创建数据存储。使用读命令功能,读取像素标签数据。看到读取和显示像素标签数据.
例子
查看导出的像素标签数据
读取从标签应用程序导出的图像和相应的像素标签数据。
visiondatadir = fullfile (toolboxdir (“愿景”),“visiondata”);构建体= imread(fullfile(VisionDatadir,“建筑”,“building1.JPG”));buildardlabels = imread(fullfile(VisionDatadir,“buildingPixelLabels”,“Label_1.png”));
中为每个像素值定义类别建筑标签.
labelids = [1,2,3,4];labelcats = [“天空”“草”“建筑”“人行道”];
使用图像和定义构造一个分类矩阵。
buildardlabelcats =分类(buildinglabels,labelids,labelcats);
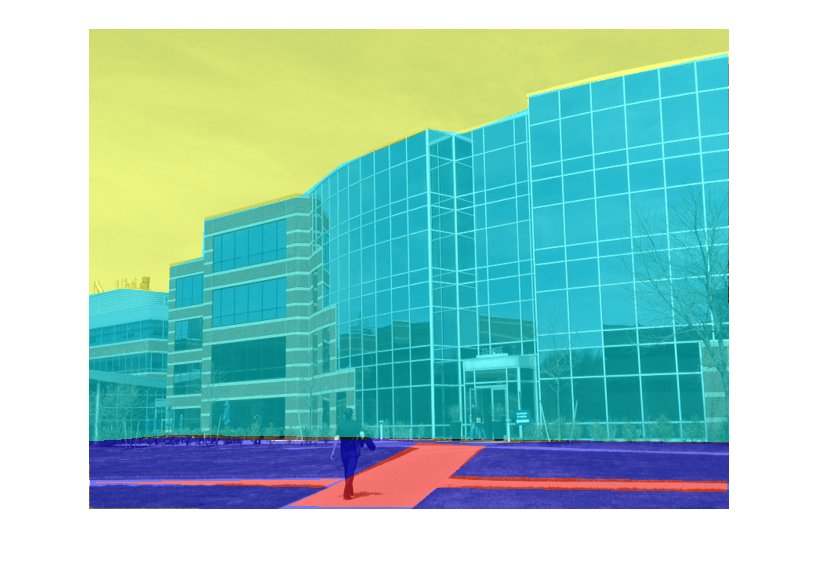
显示覆盖在图像上的类别。
图imshow (labeloverlay (buildingImage buildingLabelCats))
![]()
读取和显示像素标签数据
在图像上叠加像素标签数据。
设置图像和像素标签数据的位置。
datadir = fullfile(toolboxdir(“愿景”),“visiondata”);imDir = fullfile (dataDir,“建筑”);pxDir = fullfile (dataDir,“buildingPixelLabels”);
创建镜像数据存储。
imd = imageDatastore (imDir);
创建像素标签数据存储。
ClassNames = [“天空”“草”“建筑”“人行道”];pixelLabelID = [1 2 3 4];一会,pxds = pixelLabelDatastore (pxDir pixelLabelID);
读取图像和像素标签数据。阅读(pxds)返回一个分类矩阵,C.元素C (我,j)为分配给位置为l(我,j).
我=读(imd);C =阅读(pxds);
中显示标签类别C.
类别(C {1})
ans =4 x1细胞{'sky'} {'grass'} {'building'} {'sidewalk'}
覆盖并显示像素标签数据到图像上。
b = labeloverlay(i,c {1});图imshow(b)
另请参阅
应用程序
对象
功能
相关话题
您还可以从以下列表中选择一个网站:
